
FVD Encore
New features: Ability to add an agent to the fleet mid-mission New and improved HIGH task allocation: HIGH2 Better task...

MULTI-ROBOT SEARCH AND RESCUE
Autonomous search and rescue of victims in an indoor environment using a multi-robot team


New features: Ability to add an agent to the fleet mid-mission New and improved HIGH task allocation: HIGH2 Better task...

System Features Collaborative mapping and localisation through information sharing Parallelising search using efficient Task Allocation Cooperative navigation and swarm intelligence...

Fleet size: 5 robots!! Perception Perception subsystem is now integrated with rest of system Increased resolution Cameras need to be...

MRSLAM Added check before correcting odometry with laser scan Added mutex’s to make algorithm multi-threading safe Adjusted raytrace behavior to...
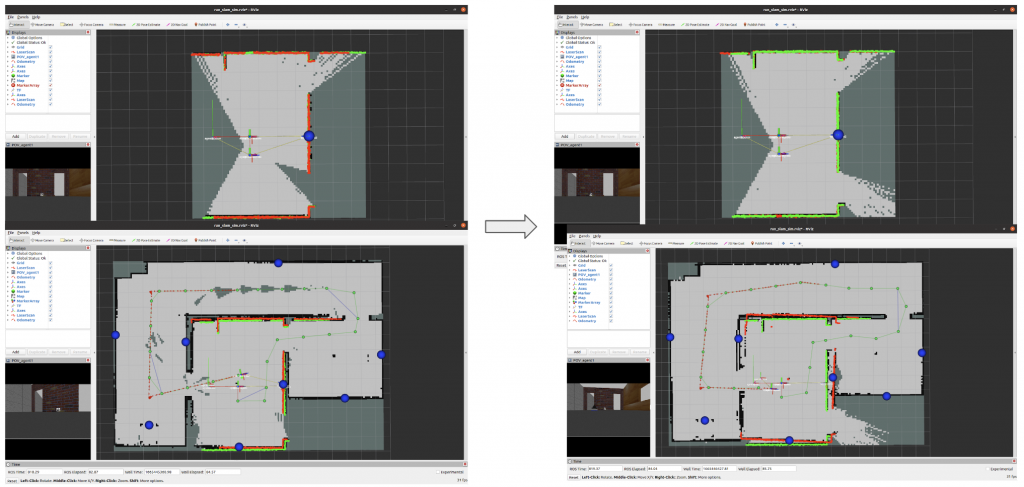
MRSLAM Testing and tuning in real life Initial testing with 4 robots – identified initialization issue Modified Ray Casting behaviour...

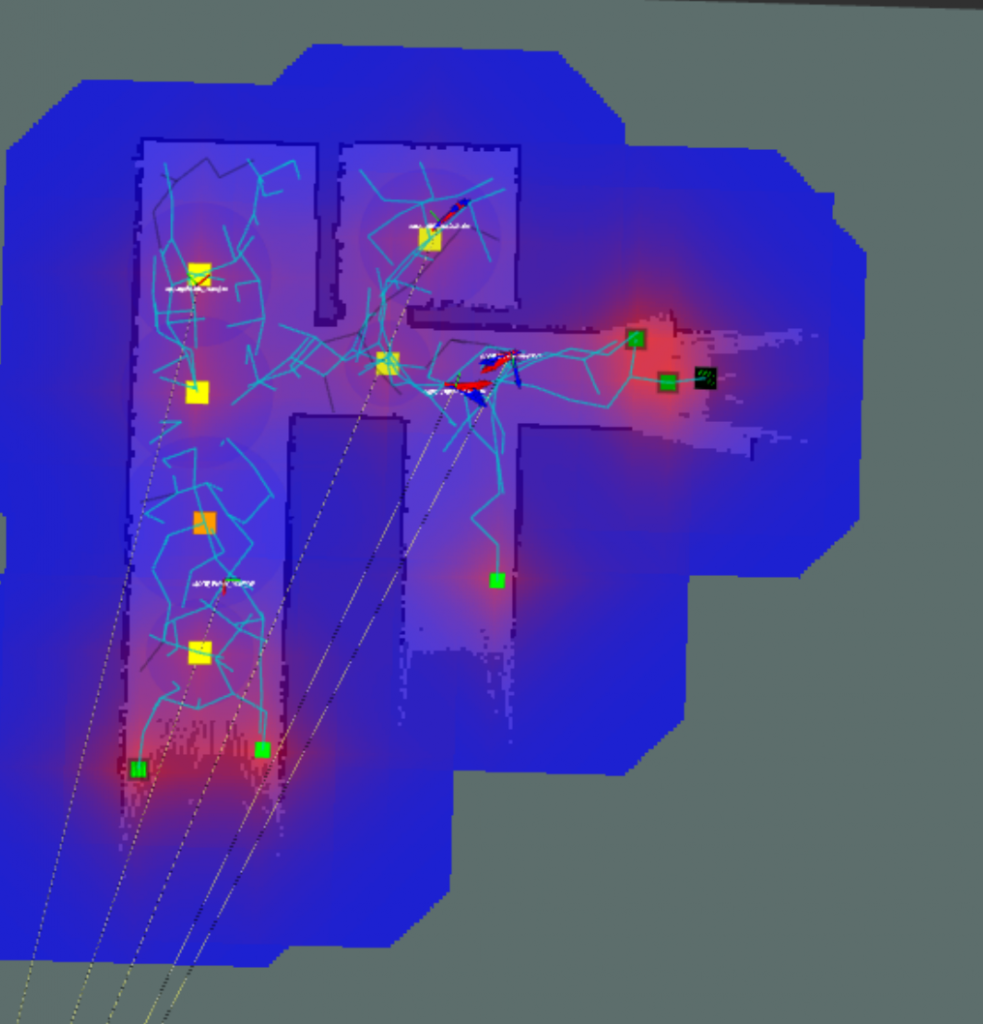
GUI Mission control GUI implemented with PyQT5 Displays: Agent status: active, battery, feedback frequency, IP Task allocator visualization High-level system...
Project Management Schedule FVD scope Subsystem reorganizations, re-assigning subsystem leads Initial research on new features: Multi-robot SLAM Heterogeneous task allocation...
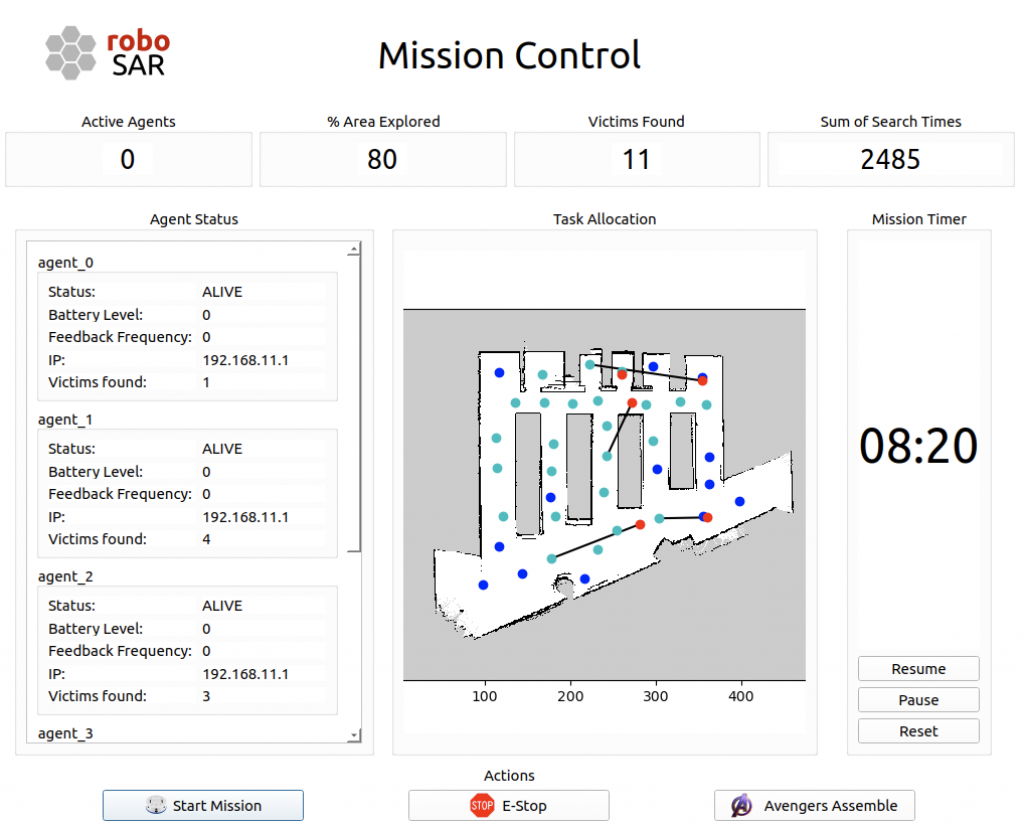
Then Mission Control GUI is a user interface where the user running the mission can monitor and interact with the...
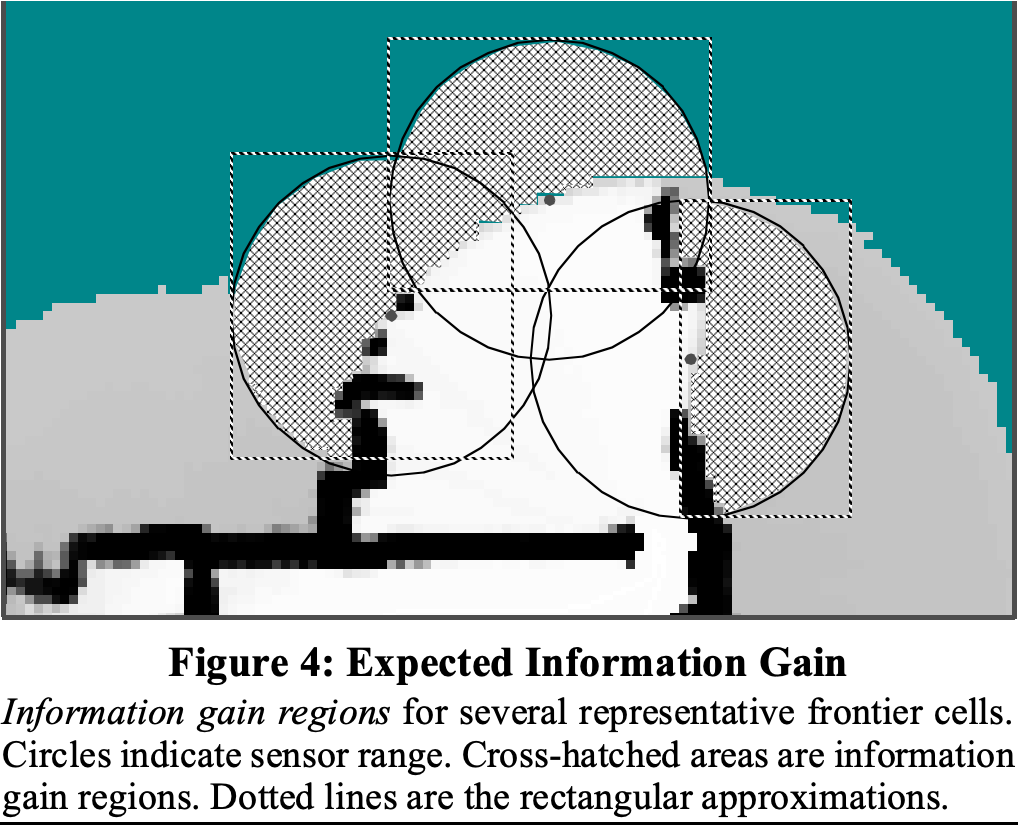
Now that we are performing search in an unknown environment, we: Need to be able to generate interest points that...
The task allocation subsystem efficiently assigns each robot tasks such that all tasks are completed in minimal time. Inputs Outputs...