Pickup Mechanism:
Design and Prototyping
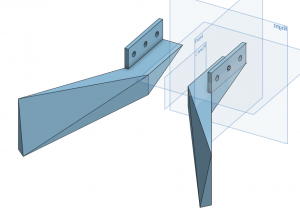
Team Cobot began by designing an initial CAD model.
However, Team Cobot believes that the best way to clean up is to get your hands dirty. To that end we have been prototyping our pickup mechanism to iterate our design.
Along the way we found a pickup belt that we decided to purchase and which will provide us with many of our driving dimensions.

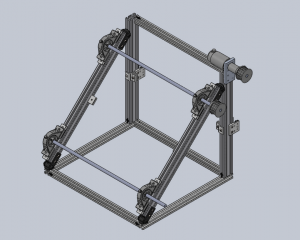
The litter pick-up mechanism is centered around a header pick-up belt meant for agricultural applications, to ensure maximum durability.

The belt is placed on conveyor pulleys, which were custom built for the purposes of our application. The pick-up mechanism is driven using a friction belt, this was selected to prevent sand from causing interference in the drive system. We purchased a low-speed high-torque motor to drive minimize the likelihood of the system getting jammed.

A separate battery was added to the bed of the Husky to power the pick-up motor. This was necessary as the motor draws too much current to run off of the Husky’s battery, but it has the added advantage of acting as a counterweight to the pick-up mechanism.

Early on, our pick-up mechanism structure stretched out significantly from the front of the Husky. However, early testing revealed a high risk of the pick-up mechanism getting stuck on deviations in the terrain. Therefore, we decided to modify the mechanism structure to bring it closer to the body of the Husky.

SVD Implementation
We began this semester by building several different iterations of the pick-up mechanism using wood or other cheap materials. The goal of this was to discover and eliminate practical design flaws before spending large amounts of time or money designing and manufacturing a more permanent mechanism out of metal. Initially, we intended to build a trailer to pick-up and store litter. However, during our prototyping period, we found that we could that we could fit our pick-up mechanism and storage compartment on the body of our UGV, simplifying our design. Once we had a design we were comfortable with we manufactured the mechanism out of 8020 t-slotted aluminum. Initially, we used a high torque low-speed motor from inventory to run the pick-up mechanism, but once we had finalized on a design we were able to select and purchase a better motor using our original motors torque current curve.
We purchased an off the shelf agricultural pick-up belt with pick-up teeth to act as our pick-up end effector. We had hoped to use it without modification, however testing revealed that gaps in the teeth allowed cups to be missed. To resolve this issue we added a mesh between the teeth to ensure all trash was collected. During field testing, we found that the pick-up mechanism was effective at picking up plastic bottles, solo cups and coffee cups. Currently, the pick-up mechanism uses compression to trap and store litter. This has method has proven quite effective, but is open to modification depending on further testing as it requires the mechanism to be specifically tuned and puts an upper limit on the size of the litter we can collect. During SVD, the pick-up mechanism picked up all litter that entered the grasp of the teeth.
FVD Implementation
Though the system remained largely unchanged after our SVD, we made a small design change to include a “funnel” at the bottom of our pick-up mechanism to pick-up more cups. Without the funnels, we were running over a number of cups just outside our pick-up range.