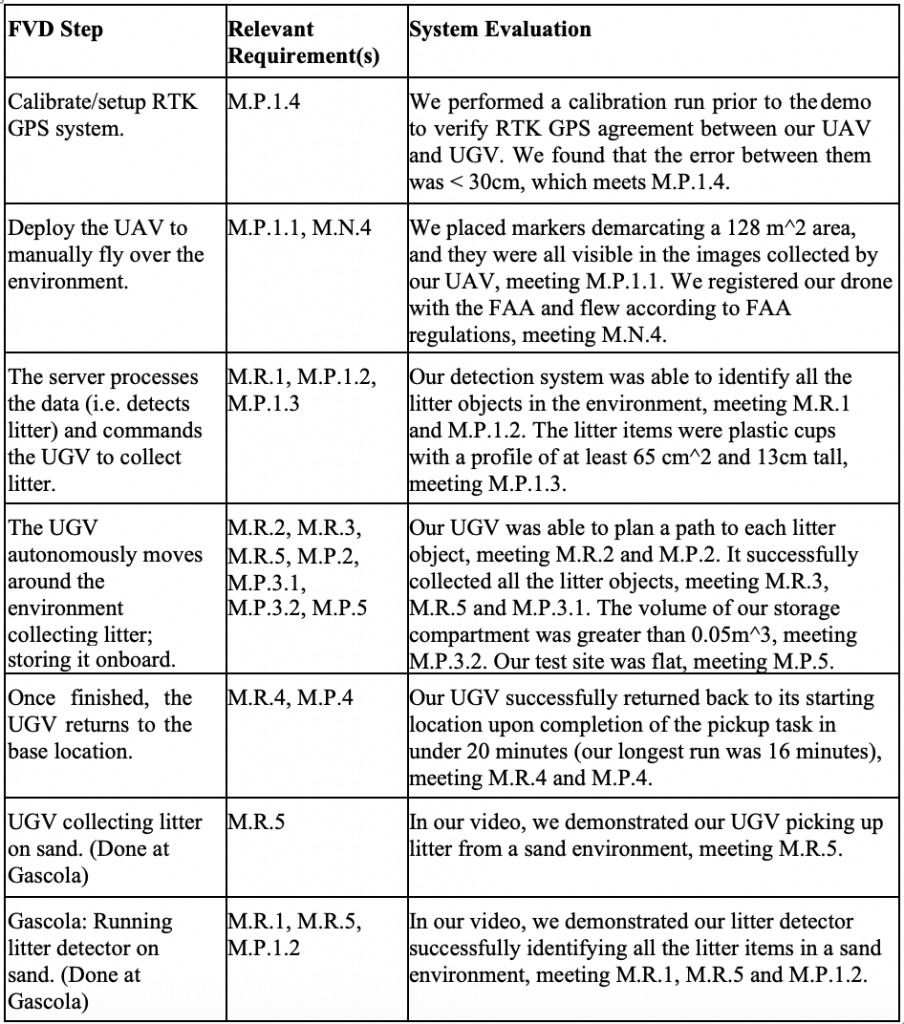
Fall Validation Demonstration (and Encore)
Our FVD consisted of a full system pipeline test connecting all parts of the system which were individually tested in our SVD. First, the UAV was manually flown over the test area recording images that are passed to the central server for processing. The central server process the images and determines the GPS coordinates of any litter. Finally, the server passes the coordinates to the UGV which goes out and collects the litter. We were able to successfully meet all our requirements. The table below outlines our FVD evaluation.
M.N.1, M.N.2 and M.N.3 were not explicitly demonstrated during our FVD. However, we have met them in the following ways:
- M.N.1: All physical components of our agents (cables, microcontrollers, antennas etc.) were easily detachable and not permanently mounted. This made it easy to quickly swap components out when needed. Additionally, our code went through rigorous code-review processes which meant that rolling back our software was also very easy. This made our overall system easily maintainable, meeting M.N.1.
- M.N.2: We used up less than 90% of our budget, meeting M.N.2 (see Budget section).
- M.N.3: Our UAV was using DJI’s off-the-shelf flight controller, which has its own safety mechanisms. Our UGV had a physical button that would stop the Husky, and we also had a way to stop the Husky through software (ROS), thus meeting M.N.3.
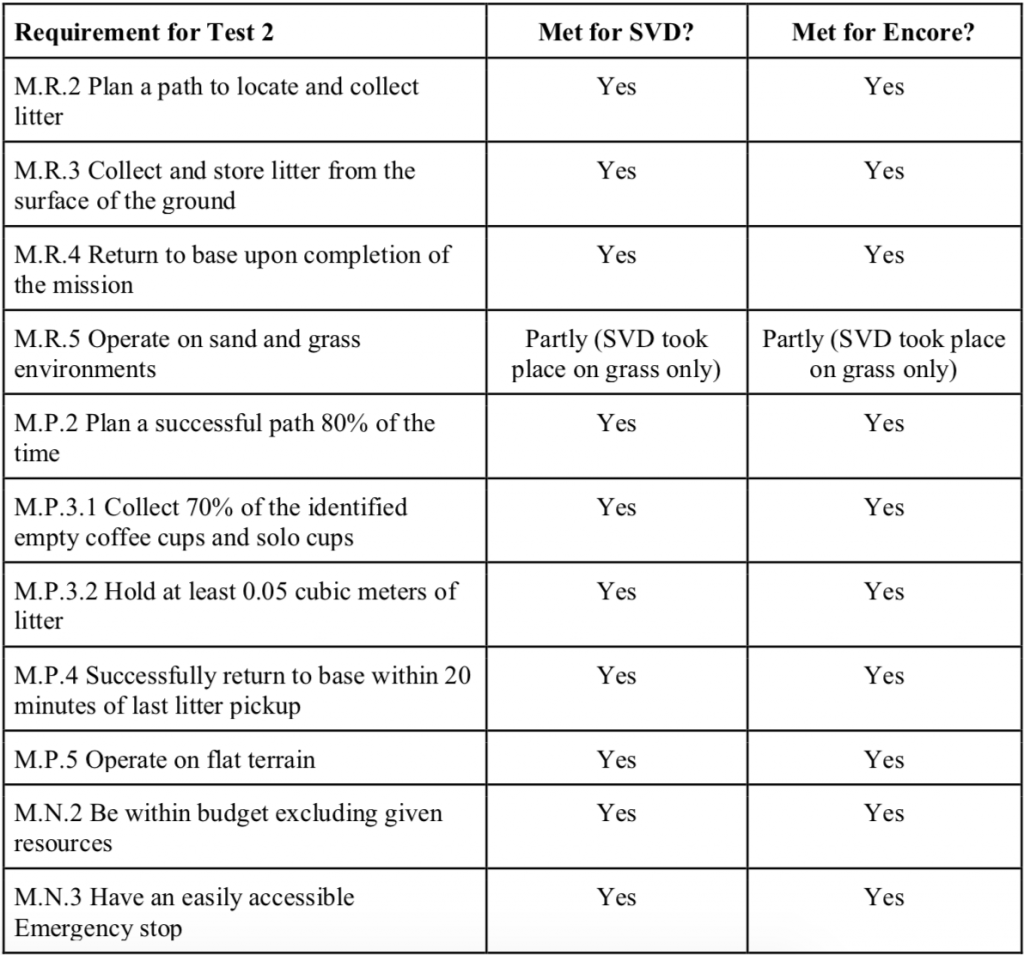
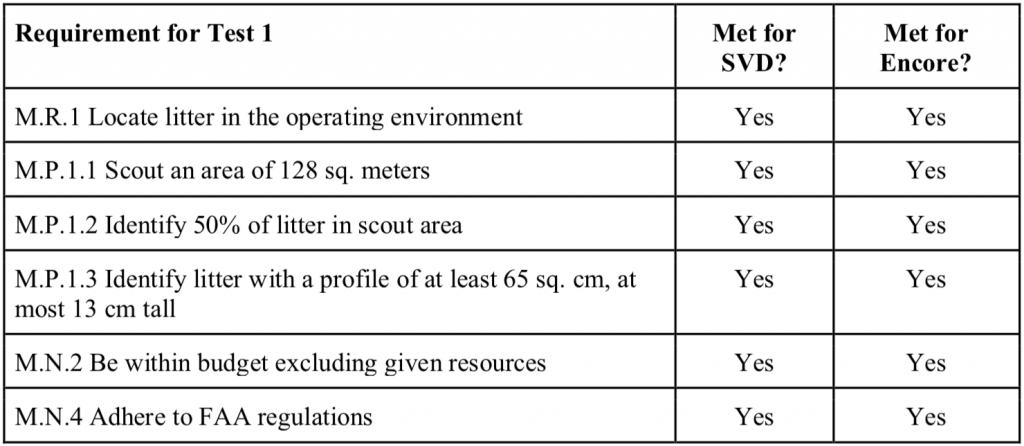
Spring Validation Demonstration (and Encore)
Our SVD consisted of two tests. They were designed to demonstration the capabilities of the UAV/Vision system and the UGV/Pickup system independently. Our FVD will demonstration these two parts of our system after their integration.
Test 1 was designed to demonstrate the operation of our UAV and the performance of our litter detection system. Our UAV was manually flown over the scout area and images were captured of the litter on the grass. After landing the UAV, the images were transferred to a laptop where the litter detection algorithm identified the litter in the images. All our success criteria for the SVD and SVD Encore were met.
Test 2 was designed to demonstrate the operation of our UGV and pickup mechanism along with the integration of localization and communication for path traversal. We first manually place litter in the operating environment and store their GPS locations (using a RTK GPS rover). We then pass these locations to the server, which commands the Husky to move to each waypoint and collect and store the litter using the pickup mechanism and storage compartment. After all the litter is collected, the Husky returns back its base. All our success criteria for the SVD and SVD Encore were met.