SVD Implementation
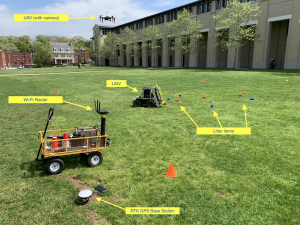
The primary task in the communication subsystem this Spring was to interact with the UGV hardware: Husky, IMU, and the RTK GPS. To achieve this, we integrated an NVIDIA Jetson on the Husky. The IMU and RTK GPS were connected to the Jetson via a USB interface. The Jetson is the main source of communication between the central server and the UGV hardware and this is done using Wi-Fi communication.
Fall 2019 Implementation
The only change we made to the Communication subsystem was the addition of the long-range unidirectional antenna. Below is an image of the antenna we added.