Fall 2019 Implementation
Greedy Closest Next Goal Planning
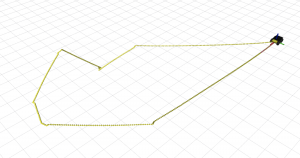
Instead of solving a whole Travelling Salesman Problem, the planner plans a path to go to all litter locations based on local greedy searches. At any given time, it goes to the next nearest goal.
The planning result as shown in Figure below
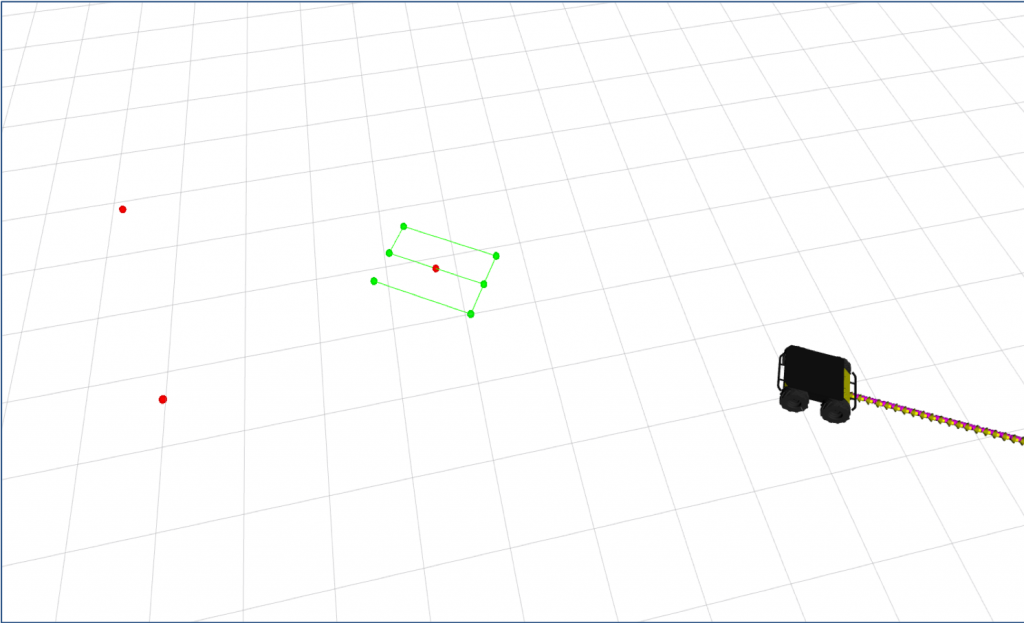
Local Coverage Planner
The UGV will create a coverage pattern around each of the cluster centers when it is time for the UGV to approach it. The coverage pattern is Zamboni like, to minimize the number of immediate turns the UGV does. The UGV will dynamically choose how many lanes the Zamboni needs to pick-up successfully collect the litter. The figure below shows a coverage pattern with 3 lanes, which means the variance was relatively low and we are relatively confident in the litter’s location. The red dots represent cluster centers.