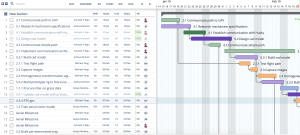
Schedule
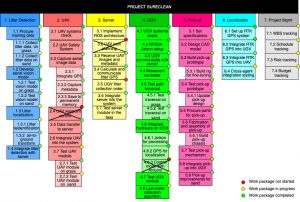
Work Breakdown Structures(WBS)
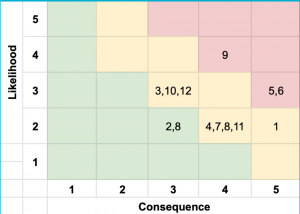
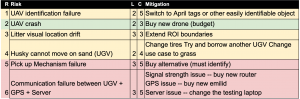
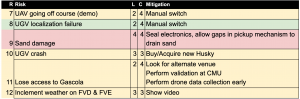
Risk Management
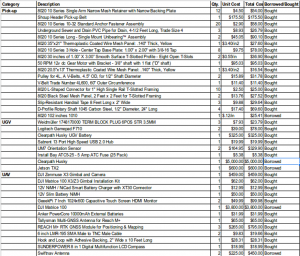
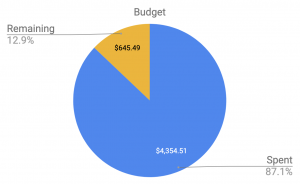
Bill of Materials and Parts List
Test Plan
Spring Validation Demonstration
Our SVD will demonstrate the functionality of the major subsystems.
Test 1: Litter Detection Test
Location: The Cut at Carnegie Mellon University
Equipment: UAV (DJI Matrice 100), Server, Solo cups/coffee cups
Procedure (and relevant requirements):
1. Place Solo cups/coffee cups at random locations on the Cut.
2. Manually fly the drone over the area and capture images of the environment.
3. Run the captures images through the litter detection algorithm.
4. Use a visualizer to verify that the algorithm is able to identify the litter in the images. (M.R.1, M.P.1.2, M.P.1.3)
Note: This test can be performed before the actual SVE and the results can simply be displayed at the demo.
Test 2: Litter Collection Test
Location: The Cut at Carnegie Mellon University
Equipment: UGV (Husky), Server, Solo cups/coffee cups, RTK GPS System
Procedure (and relevant requirements):
1. Calibrate/setup RTK GPS system
2. Deploy the UGV at a base location.
3. Place Solo cups/coffee cups at predetermined locations on the Cut (use RTK GPS coordinates)
4. The server computes a trajectory for the UGV to collect the litter and communicates it to the UGV. (M.R.2, M.P.2)
5. The UGV follows the trajectory, picking up litter off the surface along the way and storing it in its onboard container. (M.R.3, M.R.5, M.P.1.4, M.P.3.1, M.P.3.2, M.P.5)
6. Once all the litter has been collected, the UGV returns to its base location. (M.R.4, M.P.4)
Fall Validation Demonstration (FVD)
Our FVD will demonstrate the full system operation. The goal of the FVE is to verify that all system requirements have been met.
Test 1: Full System Test
Location: The Soccer Field at Carnegie Mellon University
Equipment: UAV (DJI Matrice 100), UGV (Husky), Pick-up mechanism, RTK GPS, System Server, Solo cups/coffee cups (8).
Procedure (and relevant requirements):
At Soccer Field:
1. Calibrate/setup RTK GPS system.
2. Place paper cups at random locations within the environment.
3. Deploy the UAV to manually fly over the environment and capture data. (M.P.1.1)
4. Transfer the data to the server for litter detection and localization. (M.R.1, M.P.1.2, M.P.1.3)
5. The server processes the data and commands the UGV to collect litter. (M.R.2)
6. The UGV autonomously moves around the environment collecting litter; storing it onboard. (M.R.3, M.P.2, M.P.3.1, M.P.3.2, M.P.4, M.P.5)
7. Once finished, the UGV returns to the base location. (M.R.4, M.P.1.4)
At Gascola (recorded beforehand):
1. Get a video of UGV collecting litter on the sand. (M.R.5)
2. Capture images of paper cups on the sand and run the litter detector on them. (M.R.5)
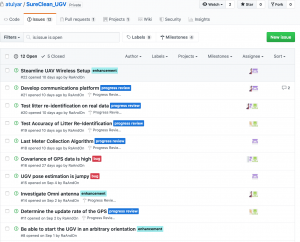
Issues Log
We have created a GitHub project and will be tracking our issues (as well as design changes) on there. The project can be found below