PROBLEM DESCRIPTION
There are currently two primary methods of cleaning beaches, either people do it by hand or expensive tractors rake the entire beach for garbage. The first solution is immensely time consuming and is highly impractical for larger beaches which can be miles long. The latter solution, though less time consuming, still takes many hours and is additionally very expensive as the cleaning equipment costs anywhere from tens of thousands to hundreds of thousands of dollars. Additionally, the latter solution has been shown to be very bad for the biome of the raked beach. This is an industry ripe for automation.
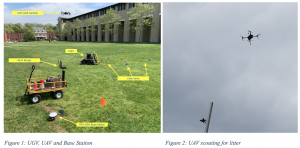
The Cobot team aims to create an autonomous beach cleaner that can pick up litter lying on the dry sand of the beach. The beach cleaning system uses an unmanned aerial vehicle (UAV)-unmanned ground vehicle (UGV) combination to clean the beach with commands originating from the central server.
USE CASE
Mr. Elsner works for a Massachusetts Cape Cod resort and just purchased a new Cobot Sureclean robotic beach cleaning system. A major part of his job is cleaning the resort’s 300 yards of beaches, a job which takes over an hour and uses a machine which ranges from tens of thousands of dollars to hundreds of thousands of dollars. The Sureclean system is designed to autonomously identify and pick up discarded litter on the dry part of the beach, effectively replacing this expensive machine and freeing up time in Mr. Elsner’s day.
The Sureclean system is delivered by a Cobot technician. Upon delivery, the technician creates a map of the beach for the system’s RTK GPS localization. The technician then shows Mr. Elsner how to define the region of the system’s operation. The system comes with a base station for recharging, an RTK GPS station, a UAV for scouting the beach, and a UGV for picking up the litter. The technician sets up the RTK GPS followed by the base station and allows the UGV and UAV to charge.
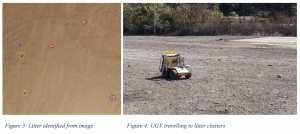
The next morning at sunrise, when the beach is empty, Mr. Elsner walks over to the Sureclean base station which has green indicator light to show that the system is charged and ready to go. Mr. Elsner pushes a button launching the system, and the Sureclean system begins its routine. First the UAV deploys and performs a scout routine, flying 20m above the ground safely above the height of any people and in accordance with FAA regulations. Along its route, the UAV takes pictures localized by the RTK GPS of the beach. Upon its return, the UAV lands by the base station and begins recharging, it also uploads all of the images it took to the base station, which begins processing the images.
The base station finishes processing the images and has identified litter regions of interest (ROI). The Sureclean system then deploys the UGV to go out and pick up the litter at the ROI. As the UGV approaches the first ROI, it enters activates its pickup raking mechanism and enters into a full coverage pattern to clean up the entire ROI. The UGV then repeats this process until it has picked up all of the litter ROI. At which point the UGV returns to the base station. When the UGV returns to the base station, Mr. Elsner collects the litter from the UGV and places it in a dumpster.
The figures below outline the operation of our system during a typical use case.