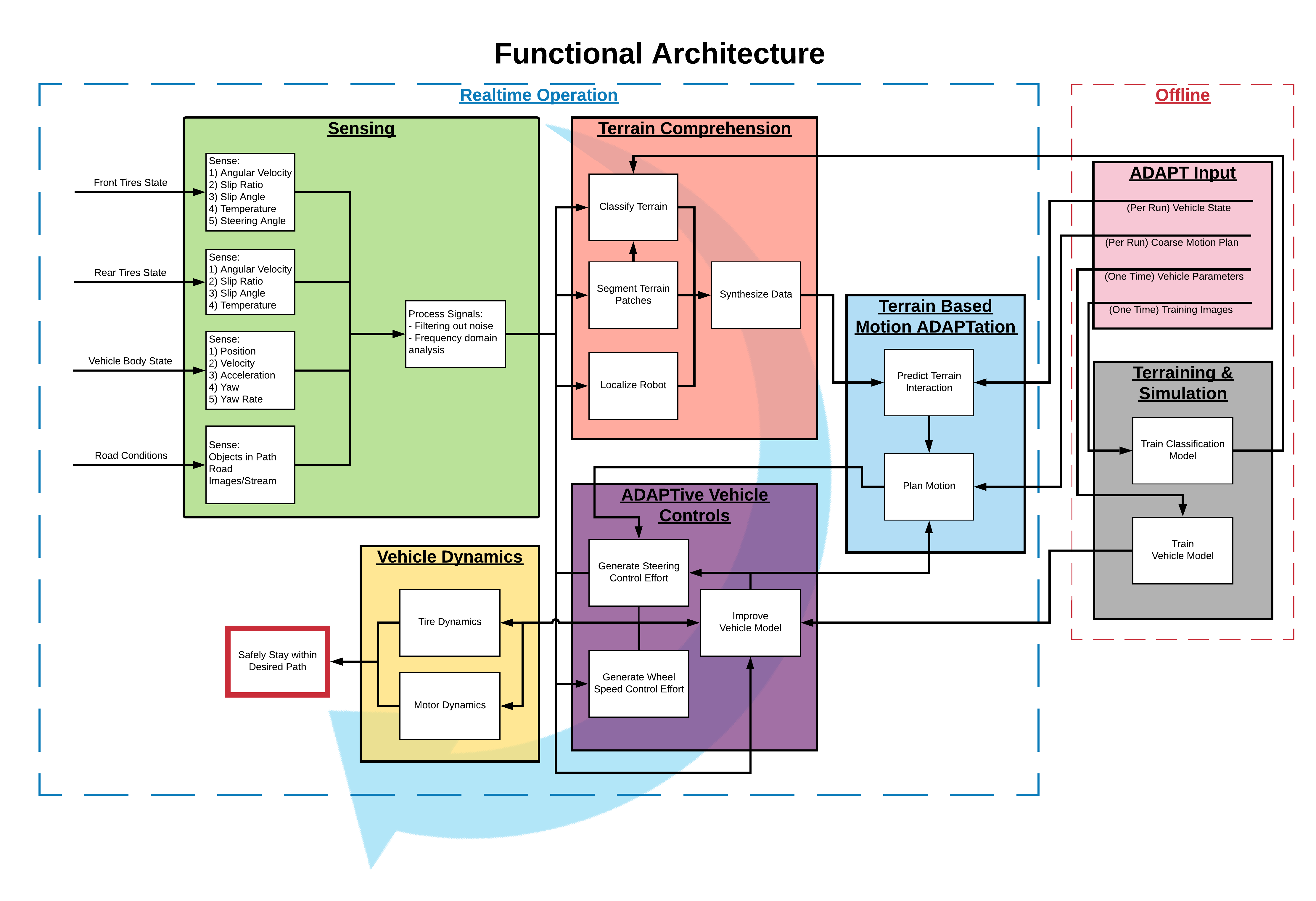
The Functional Architecture shown above details the flow of functions through the various subsystems of the ADAPT system. It also shows the relationships between the subsystems and the interdependencies therein.
The first block is Sensing which is required to perceive the oncoming road conditions and also determine the state of the car. This enables the Terrain Comprehension subsystem to classify and segment the road into areas of interest that are used to synthesize and localize the vehicle within a map representation. The Terrain Based Motion Adaptation block then predicts the coefficient of friction of the mapped terrain and plans vehicle motion around or through it.
The ADAPT Input and Training & Simulation blocks are offline components of the architecture wherein data from inputs are used for training the classification model and also the vehicle model. The ADAPTive Vehicle Controls block generates steering effort and wheel speed control effort that enables the vehicle to circumvent or safely traverse through the target area of slippage. It also consists of the model improvement block which iteratively updates the parameters in the vehicle dynamics model by using state feedback information to continuously get the most accurate model possible.
Overall, the various subsystems in the functional architecture work together to meet the system level requirements that are stipulated for the system.