Subsystem Modeling Analysis Test
1. UAV Localization and Navigation
- 2D navigation stack that takes in information from odometry, sensor streams, and a goal pose and outputs safe velocity commands (ROS navigation)
- No static map or SLAM is applied
The UAV can follow the GPS waypoint and avoid obstacles based on sensor input, which is lasers can from LIDAR.

2. UAV Apriltag Tracking and Landing
- Use April-tag ROS package to detect the April-tag
- Define transformation matrix to get the correct pose of April-tag in Odometry frame
- Use the PID controller to control the motion of the UAV
The UAV is able to accurately estimate the pose of an April-tag using the camera as well as track and land on the April-tag with the PID controller

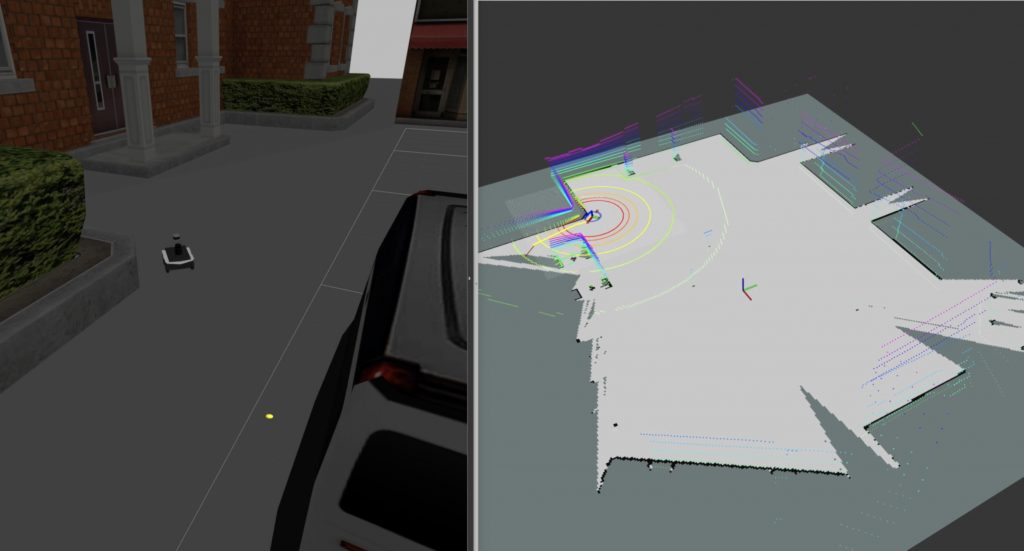
3. UGV Mapping and Navigation
- Create a 2-D occupancy grid map from Velodyne and pose data collected by mobile root (SLAM)
- Run autonomous navigation avoiding obstacles by means of global and local path planning
The UGV can successfully create the map using the Lidar sensor and avoid obstacles while navigating through the map. Meanwhile, the UGV can autonomously choose the landing point where is suitable for the landing.
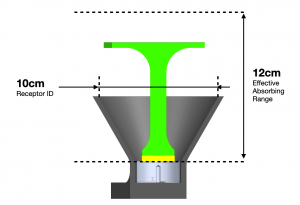
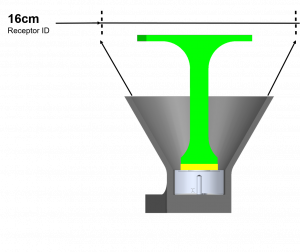
4. Landing Module
- The landing module has a 10 cm diameter and the effective absorbing range for the electromagnet is 12 cm.
- The landing process will be much easier by lifting up the receptor and increase its diameter to be 16 cm.
Spring Validation Demonstration
Test 1. UAV Apriltag Following and Obstacle Avoidance
For test 1 of the Spring Validation Demonstration (SVD), we want to confirm the ability of the UAV to follow the waypoints and autonomously avoid all the obstacles regarding the M.P.2. We performed the test in Gazebo simulation and created many brick walls as obstacles in the Gazebo world. We defined totally 5 waypoints and the final waypoint is the location of the Apriltag, which is placed 30m away from the start location. The size of the Apriltag is 0.25m². To demonstrate the system’s robustness, we also put one waypoint on the obstacle to test if the UAV can know the waypoint is actually located on the obstacle. Instead of directly go to this waypoint and hit the obstacle, the UAV should avoid it and directly go to the next waypoint. The UAV is able to avoid all the obstacles which meet the M.P.2 and it lands on Apriltags with an error of 0.13m.
- M.P.2 – UAV avoids all obstacles

- The UAV lands on Apriltag with error < 0.15 m
Test 2. UAV Field Test on GPS Waypoint Following
To confirm the GPS is accurate and demonstrate the UAV can follow the waypoints in the real world, we performed the field-test for the UAV to take-off, follow the waypoints, and land at the take-off location. We pre-defined a square loop with side length 6m as the trajectory for the UAV to follow. In the end, the UAV should finish the loop and lands. We performed 5 trials and measured the error between the take-off point and landing point for each trial. The errors are all smaller than 0.5m.
- UAV finishes the square loop and lands within 1m of starting point


Test 3. UGV Decision Making and Automatic Navigation
This test is designed to test the obstacle avoidance and navigation ability of the UGV against the M.P.1 and M.P.3. A 20m x 20m area with ±5m tolerance on each side is created as the map and the map has one feasible and one infeasible landing point candidates. The path length to travel to each landing point from the starting point is 8±2m and the path length to travel to both landing points from the starting point is 30±5m. When the UGV receives landing command, it will automatically navigate towards computed one landing point. Near the landing point, the UGV will automatically explore obstacles to update its map and determine whether this landing point is appropriate for landing or not. If this location is not appropriate for landing, the UGV should navigate towards another landing point candidate.
During the test, we performed a total of 5 trials, and the UGV can avoid all the obstacles while traveling through the map in all the trials. The following table shows the results. Meanwhile, UGV can reach the landing point candidate around the 50s for all the trials. We also evaluated the (x, y) error of the final target location for all the trails against the M.P.4, which are all less than (0.3m, 0.3m)
| Time (s) | (x, y) Error (m) | Collision | |
|---|---|---|---|
| 1 | 50.8 | 0.22, 0.21 | No |
| 2 | 45.8 | 0.20, 0.17 | No |
| 3 | 48.7 | 0.25, 0.18 | No |
| 4 | 50.1 | 0.19, 0.21 | No |
| 5 | 49.3 | 0.23, 0.19 | No |
- M.P.2 – UGV avoids all obstacles
- M.P.1 – Within the test map, the UGV will reach a landing point candidate within 60s
- M.P.3 & M.P.4 – The UGV can reach the final target state with (x, y) error less than (0.3m, 0.3m)
Test 4. UAV Manual Landing onto Apriltag Platform
The UAV landing onto the platform was evaluated against the M.P.1 and M.P.9. We fixed the landing module onto the ground and placed the UAV onto the landing module. To maneuver the UAV to take off, we switch off electromagnets and power on the UAV with remote control mode. We manually fly out the UAV for 100m, then invoke DJI autonomous GPS Return To Home function. When the UAV returned to the initial take-off location, we manually maneuver the UAV to approach the landing platform and adjust its pose to align with the receptor. We totally performed 5 trials while 4 trials are successful. The possible reasons for the failed trial are that the compass is not calibrated before the flight and the UAV cannot hover steadily. We also measured the landing distance error of the GPS Return To Home and the average error of the 5 trials is 0.31m.
- M.P.1 – The landing process success rate is over 60%
- M.P.9 – The GPS Return To Home will generate an error less than 1m
Spring Validation Demonstration
During the FVD and FVD Encore, we demonstrated the UAV’s ability to follow GPS waypoints, avoid simple obstacles and land autonomously onto the UGV. Under windy conditions (>10 knots), the UAV was able to achieve a landing success rate of 80\%. However, it was not able to finish the whole landing process within 60 seconds. As for navigation, the UAV was able to avoid obstacles and was able to reach the two way points assigned for all trials with an accuracy less than 2 meters. The UAV was also able to finish a single trial using a single battery, although we did have to switch batteries between trials.
In the FVD setup, the UGV was initialized around six regular-shaped obstacles, and it was able to avoid all of them during navigation, satisfying M.P.2.
The UGV was able to find a valid landing point, which was defined as a point with no obstacles within a 2.5m radius, within 120s. It did not run out of battery during the process, satisfying M.P.7
- M.P.1 – UAV land on UGV within 60 seconds
- M.P.2 – UAV and UGV avoid all obstacles
- M.P.3 – UAV have a safe and steady land on UGV with a success rate of 60 %
- M.P.7 – Neither UAV or UGV ran out of battery