- – Delivery System Server
- – Package Receiving Platform
- – Drone Navigation
- – Sensing
- – Package Manipulation
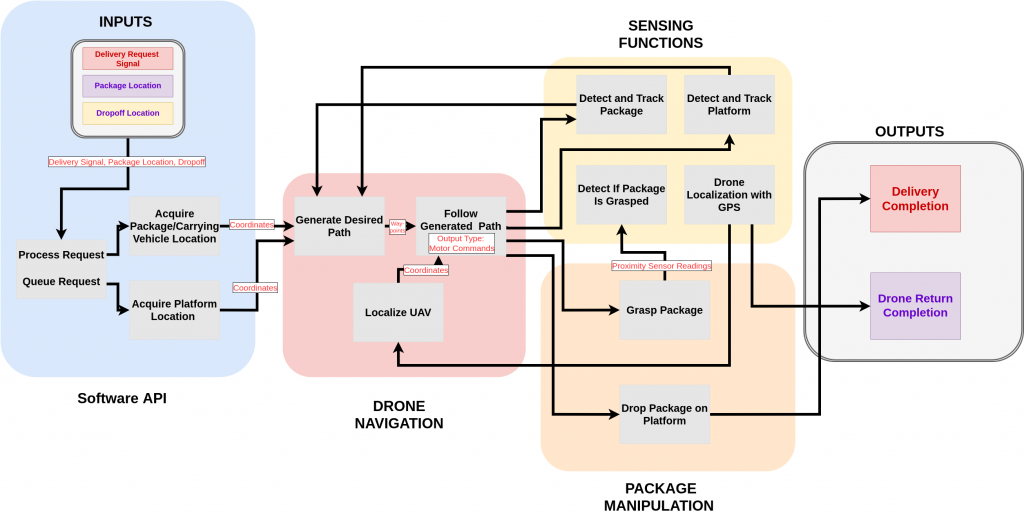
The system takes in the delivery request signal from the deliverer as input. The delivery system server then uses this information to generate pending job queues and desired path/trajectory both from the drone docking station to the package and from the package to the package receiving platform.
The drone navigation subsystem will take in the desired waypoints given by the server, and control the drone to follow the generated path. The drone will fly to the general vicinity of the package/platform using the waypoints, use visual servo methods from the sensing subsystem to pinpoint the exact location of the package/platform, then approach the package/platform to perform manipulation. As for the package manipulation, both picking and dropping are being performed with a gripper utilizing electromagnets.
Once the delivery has been made (the drone confirms that the package is not being gripped anymore and the platform detects the package arrival), the system will output a delivery completion message. Once the drone is finished with all the delivery queues, it will return to its standby area/docking station and output a drone return completion message.