| ISSUE NUMBER | DATE FOUND | DATE RESOLVED | CHANGE BY | ORIGIN | DESCRIPTION | RESOLUTION | ARTIFACTS CHANGED |
|---|---|---|---|---|---|---|---|
| 1 | 02/26/2020 | 03/01/2020 | Quentin | Meeting with Air Lab for Navigation System | DJI drones need to read from its own GPS to satisfy its EKF needs to produce proper state estimations for Position and Velocity Controls. | Use DJI Hardware/Controller with its own GPS for this semester’s development demonstrations, while working on building our own EKF. | Navigation stack altered for this semester. |
| 2 | 02/28/2020 | Fall/2020 | Team | First Drone Flight Test | Drone was not able to stabilize itself even in GPS mode and drifts sideways. | Plan further tests and debugging procedures for GPS and compass data. | Future schedule changes. |
| 3 | 03/08/2020 | 03/08/2020 | Quentin | Crash during flight test | Propellers, propeller guards, and landing gears broke, but everything else intact. | Create proper flight procedures for all future flight tests and conduct formal retrospection. Respect all physical tests. | Added flight procedures to tutorial documentation. |
| 4 | 03/12/2020 | 03/20/2020 | Team | COVID-19 Pandemic | Due to the virus, CMU goes virtual. All physical test plans are in jeopardy. | Move this semester's development into Gazebo Simulation with a focus on path planning. Transfer physical development to Fall semester. | Manipulation/physical systems postponed. |
| 5 | 10/03/2020 | 10/28/2020 | Barath | FIxing the magnet onto the drone | The magnets were turning off automatically without any control signal | Fixing the magnets in a proper orientation such that the hardware button is not toggled when the box is attached because of the force. | Be cautious about the hardware switch present on the magnet. |
| 6 | 10/20/2020 | 10/27/2020 | Team | Field test - April tag detection during day time | Unable to detect the April tag when it's too bright outdoors because of unreliable auto-focus , auto-brightness | Placing the box on top of a white tarp to fix the contrast issue between the grass and April tag . | Usage of the tarp for every test in future. |
| 7 | 10/23/2020 | 11/03/2020 | Team | Field test - Visual servo | Drone loses track of the April tag and doesn't know what to do when the tag goes out of the frame | Added a look around behavior to make sure the drone searches for the April tag if it goes out of bound | Added the look around feature as a part of the behavior tree. |
| 8 | 11/14/2020 | 11/16/2020 | Team | Field test - full mission | Inaccurate detection of April tags during drop off only | The front camera was placed at an angle of 37 degrees to make sure it matches the software implementation of transformations | Check the angle every time using a protractor. |
| 9 | 11/16/2020 | 11/22/2020 | Quentin | Field test - prior FVD trial run | A bug in the code prevents transitioning from pickup to drop-off after the package is picked. | A minor bug in the behavior tree code was fixed | Carefully look at the behavior tree during mission to find out any future bugs. |
| 10 | 11/16/2020 | 11/23/2020 | Team | Field test - prior FVD trial run | Inaccurate GPS localisation because of the misalignment in the Drones frame and the world frame | Change the orientation of the drone to make sure they align | Use a compass to align the frames before starting the test. |
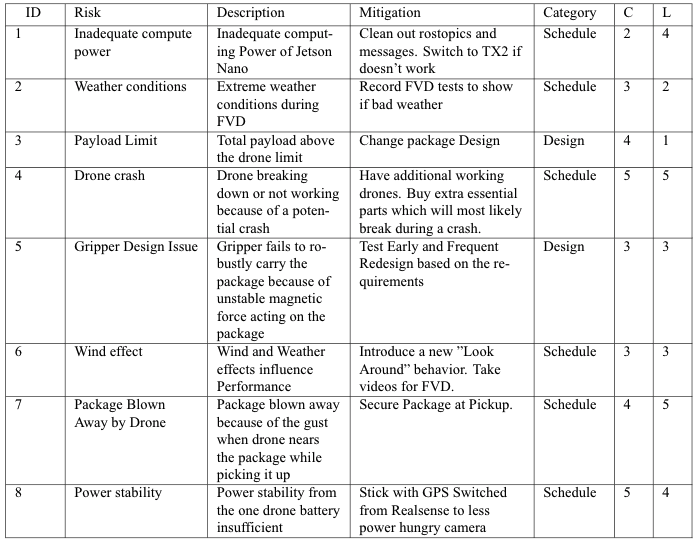
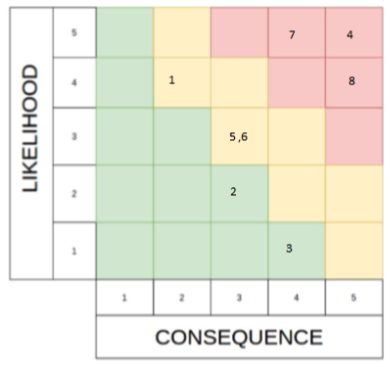
Risk & Mitigation