Sensor Placement
The main component of our system requiring physical design is the mounting of the sensors on the Husky.
Our first iteration of sensor mounting is shown below.
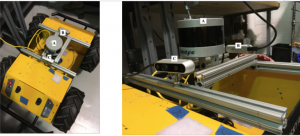
Figure 1. Sensor placement on Husky. A is the Velodyne LiDAR, B is the Intel RealSense d435, and C is te Intel RealSense d435i.
After collecting data using this sensor configuration in the CMU parking lot and in our custom Gazebo parking lot, we have found that the low placement of the cameras results in a low field of view of the lanes. To remedy this, our next iteration will involve elevating the sensors. We want to place the cameras at a height similar to that of a dashboard on a standard sedan. Mounting the cameras at this height will give us data much more similar to what is generated on full-size autonomous cars. For the same reason, we also hope to elevate the LiDAR to a height that matches the roof height of a sedan.
We have performed all of our Spring Validation Demonstration testing using this newly designed sensor configuration. We have yet to design and build the new sensor mount for the Husky, but we plan on doing this early in the fall semester. Below is an image of the rough sensor placement we plan to use on the Husky.

Figure 2. New sensor configuration with cameras and LiDAR elevated to a more car-like height