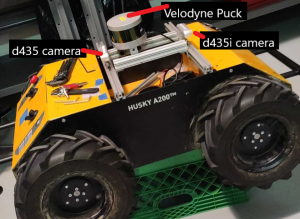
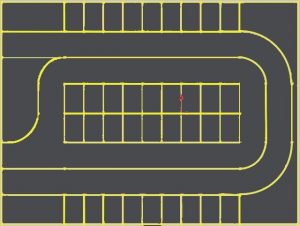
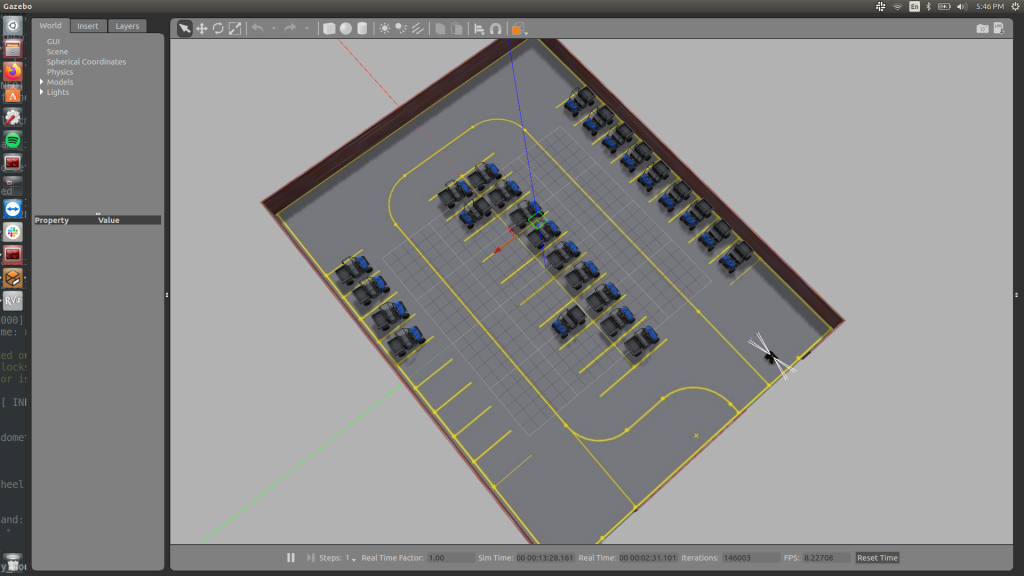
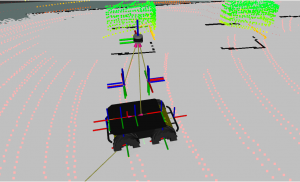
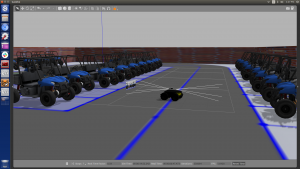
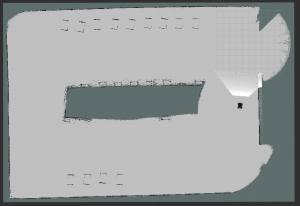
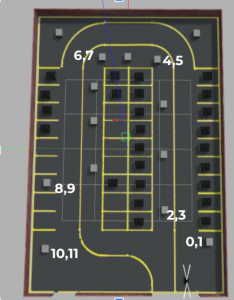
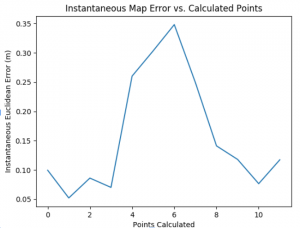
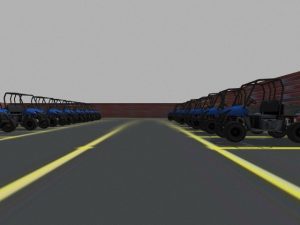
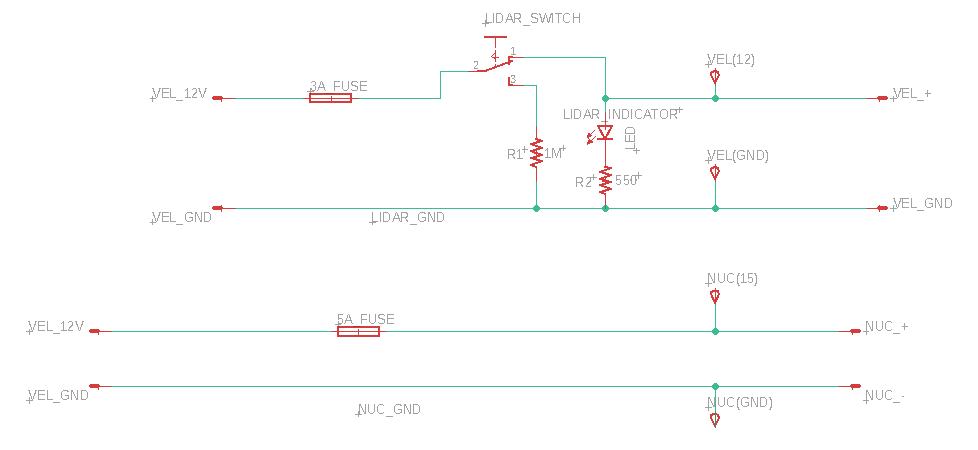
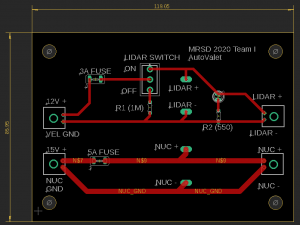
Photo Gallery Team Our first selfie from the RealSense d435! Test Platform (Husky) Photos Husky with sensors mounted Husky in Gazebo Simulation world Gazebo Simulation Ground plane with lane markings CMU parking lot world in Gazebo Sensing Subsystem Sensor data of the world RealSense images in simulation from sensor plugin Simulated LiDAR data New sensor configuration with cameras and LiDAR elevated to a more car-like height SLAM subsystem Generated grid map Generated cloud map Mapping Test Euclidean error calculated at each point Detection Subsystem Data collection for training the ERFNet model Results of ERFNet Lane detection output at different points in the garage (ERFNet) Lane Detection Test Accuracy (98.25%) Classical filtering and line fitting on the KITTI dataset (deprecated) Results of classical detection algorithm on Gazebo world (deprecated) Electrical Design PCB manufactured PCB integrated into Husky’s power system PCB schematic in Eagle software PCB layout in Eagle software Logos