Overview of Approach
The project management style blends traditional project management for high-level timeline planning to meet system-level requirements with weekly agile-based sprints to generate, allocate, and manage lowest level tasks over short, regular time intervals. This strategy was selected so the team can ensure alignment with system specifications while also adapting to design evolution throughout the project.
Iterative development enables early testing at variable fidelity to estimate if ideas are worth pursuing, promotes modular design, and delivers continuously growing value with opportunity for rapid customer and stakeholder feedback. Each sprint culminates in progressive subsystem integration and testing. Internal milestones are tied directly to the test plan to guide weekly task planning and improve verification testing efficiency.
The team meets weekly to discuss progress, check-in on timeline alignment, and re-allocate tasks for the next week. Tasks are carefully scoped and estimated during discussion to ensure completion of meaningful chunks of work in less than or equal to a week’s worth of time. Weekly check-in’s ensure a high frequency feedback loop on any blockers or challenges and allow the team to pivot efficiently to unexpected development changes. All tasks are generated, allocated, updated, and used for timeline planning in Jira.
Schedule
The development schedule uses the team test plans as internal milestones to verify progressive development of system complexity towards satisfying system-level requirements. Tests were generated for completion roughly every two weeks, as aligned with external progress review dates. The team uses Jira’s BigGantt app to manage the overall timeline, where each test is treated as a Jira Epic and tasks are created on the team’s Jira Backlog to work towards test completion. BigGantt was configured to automatically organize tasks as sub-items on the timeline so the team can plan out time estimation more accurately. Each set of tests marks a progress review, which will be presented in the following order:
Fall Semester Round-Robin Presentation Order:
- Ryan Lee (PR07)
- Russell Wong (PR08)
- John Harrington (PR09)
- Alex Pletta (PR10)
- Ben Younes (PR11)
- Everyone (Fall Validation Demonstration & Encore)
Spring Semester Round-Robin Presentation Order:
- John Harrington (Sensors & Motors Lab)
- Ryan Lee (PR01)
- Russell Wong (PR02)
- Alex Pletta (PR03)
- Ben Younes (PR04)
- Everyone (Spring Validation Demonstration & Encore)
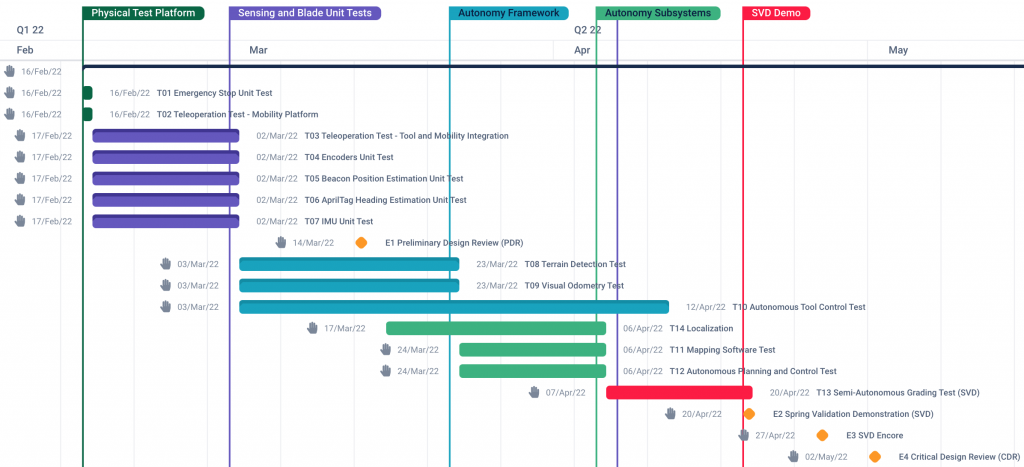
Spring 2022 Development Timeline
The primary goal for spring development was to complete the mobility platform with mounted sensors/compute and autonomy architecture to demonstrate human teleoperation with autonomous blade control.
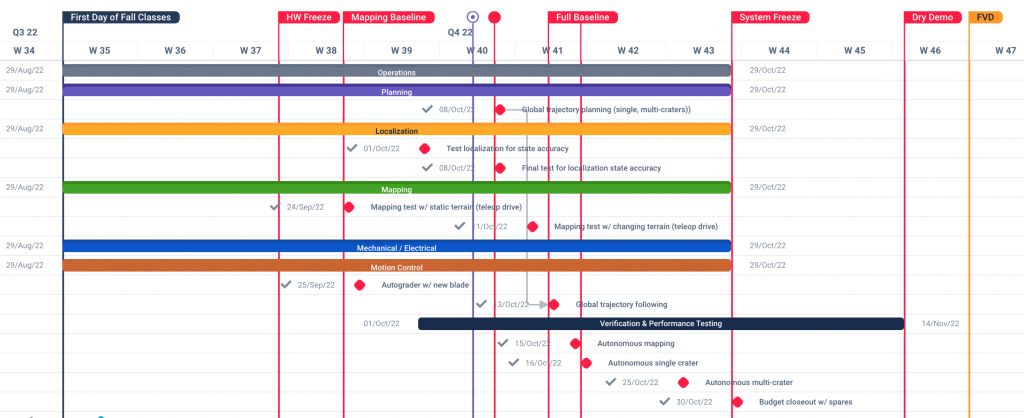
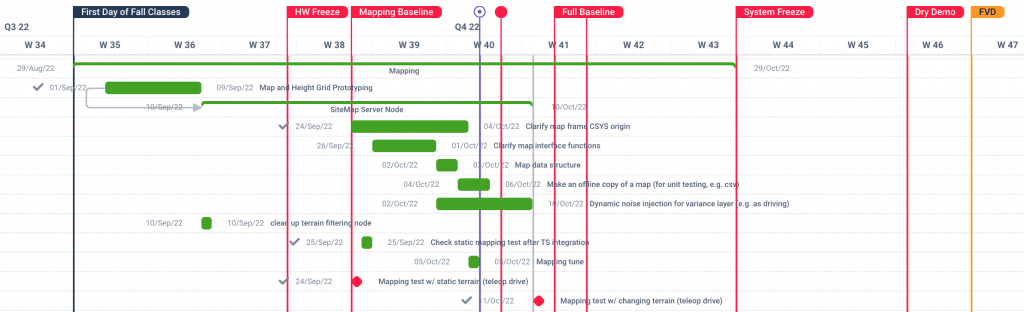
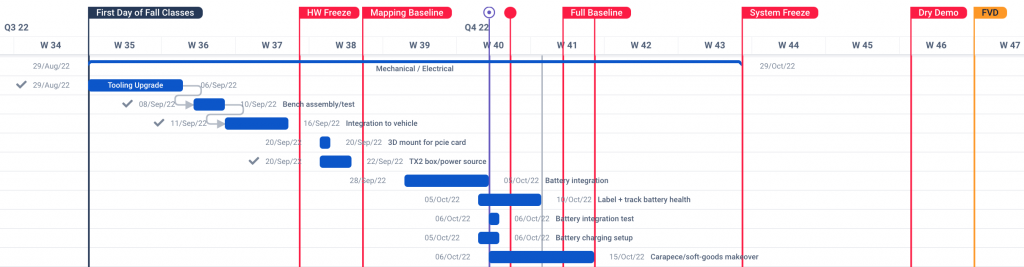
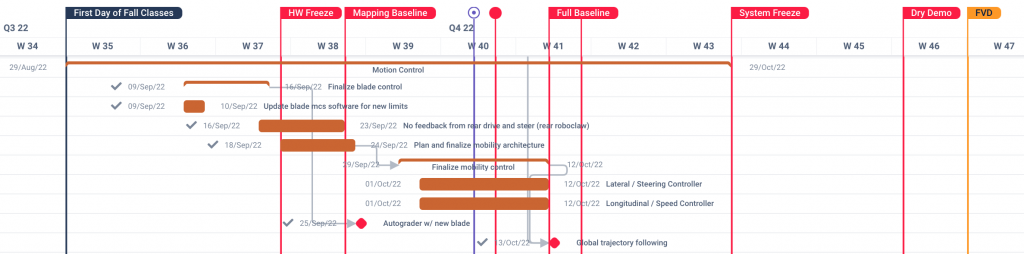
Fall 2022 Development Timeline
The primary goal for fall development has been to improve localization accuracy and implement autonomous mapping, planning, and control for completely autonomous site work operation. Below are figures capturing the overall development schedule with milestones marked by red flags and verification tests marked by red diamonds. Individual subsystem plans are also captured in subsequent figures. The final milestone is the Fall Validation Demonstration marked as ‘FVD’ in the last orange flag.


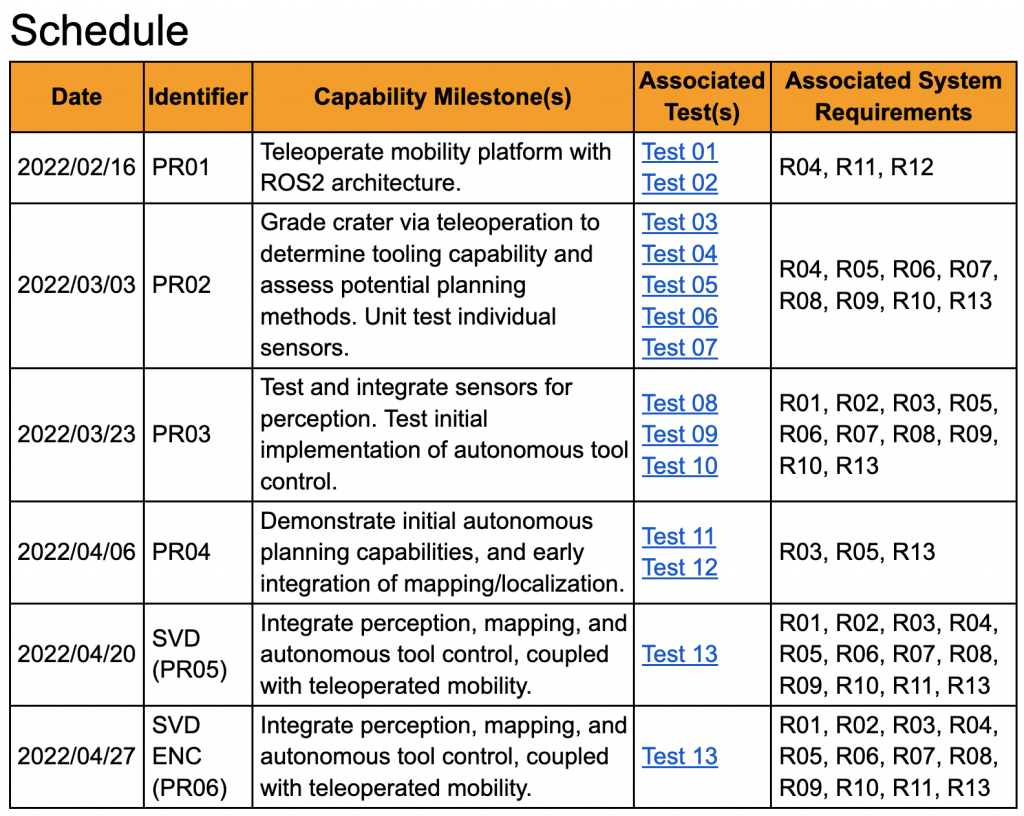
Capability Milestones
System capabilities are roughly mapped to progress reviews (PR’s) over the two semesters of development. These capabilities are further broken down for scheduling and verification testing over the Spring 2022 and Fall 2022 semesters.
| # | Test Description | Date | Test Scope | Validation |
|---|---|---|---|---|
| 1 | PR03 | 2022/03/23 | Test and integrate sensors for perception. Test initial implementation of autonomous tool control. | Sensor qualitative performance |
| 2 | PR04 | 2022/04/06 | Demonstrate initial autonomous planning capabilities, and early integration of mapping/localization. | MoCap Localization Validation, FARO Mapping Validation |
| 3 | PR05 (SVD) | 2022/04/20 | Integrate perception, mapping, and autonomous tool control, coupled with teleoperated mobility. | FARO Sitewide Metric Validation |
| 4 | PR06 (Encore) | 2022/04/27 | Integrate perception, mapping, and autonomous tool control, coupled with teleoperated mobility. | FARO Sitewide Metric Validation |
| 5 | PR07 | 2022/08/26 | Demonstrate first round of primative autonomus planning with automated tool control in limited unstructured enviroment | MoCap Localization Validation, FARO Mapping Validation |
| 6 | PR08 | 2022/09/30 | Demonstrate first round of robust autonomus planning with automated tool control in limited unstructured enviroment | MoCap Localization Validation, FARO Mapping Validation |
| 7 | PR09 | 2022/10/28 | Initial sitewide run-for-record testing with formal crater making, validation metrics | FARO Sitewide Metric Validation |
| 8 | PR10 | 2022/11/25 | Demonstration of sitewide spec with lessons learned and improvements from PR09 | FARO Sitewide Metric Validation |
Spring Test Plan
Test plans were generated for the spring semester in early February 2022. The tests were designed to verify iterative technical progress towards satisfying full system-level requirements. The test plan schedule builds towards technical demonstrations that validate system functionality in the spring and fall semesters. See here for all spring test plan summaries.
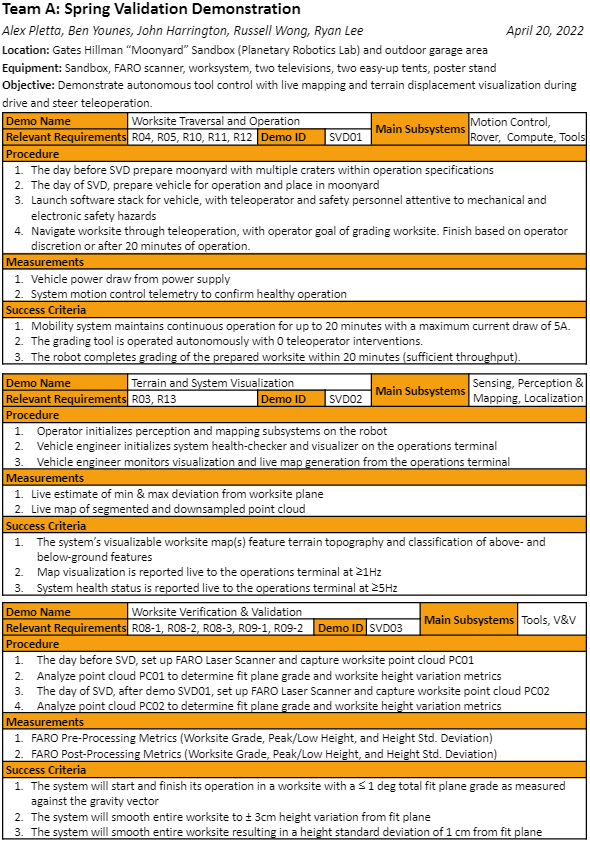
Spring Validation Demonstration
The Spring Validation Demonstration will be held in late April 2022 and attended by MRSD program supervisors, project advisors, and other stakeholders. The system will demonstrate functional capability autonomous grading blade control under user-controlled mobility teleoperation. A team member will drive the worksystem’s mobility platform, while the system will build an online map of the terrain and operate the grading blade autonomously to level a crater. Live terrain visualization will be presented and attendees will see how the terrain is shaped. This demonstration proves the core functionality of terrain detection and grading blade planning and control that will be essential components for full site-wide grading. Note that autonomous site navigation will be complete by this date, though not yet integrated with the autonomous tool control.
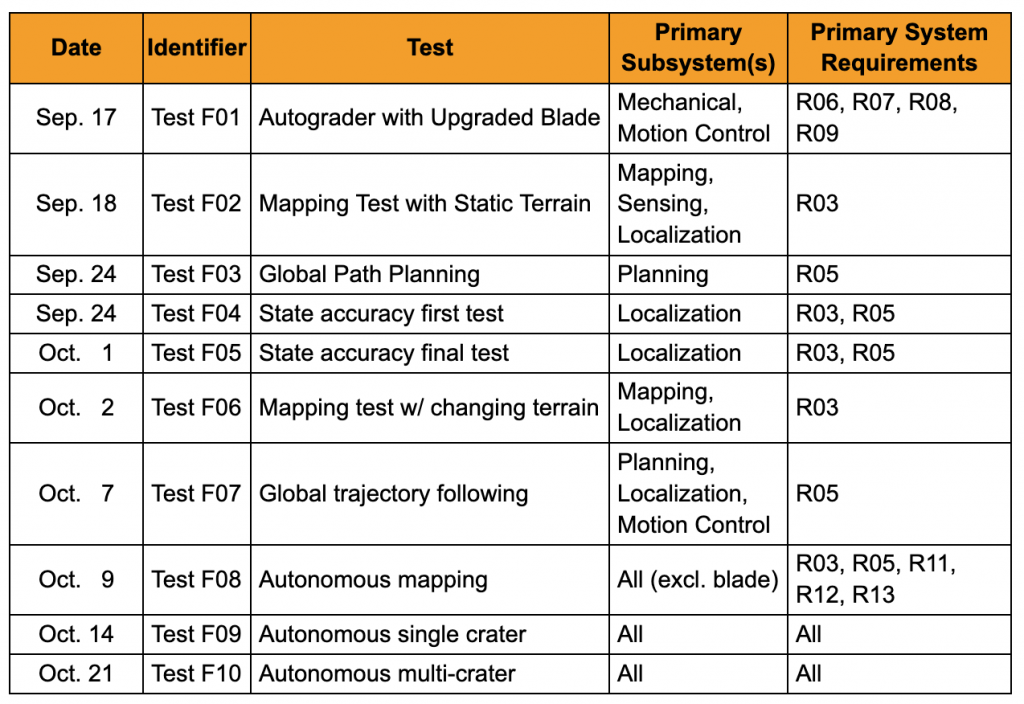
Fall Test Plan
The Fall Test Plan lays out a nominal timeline for verifying system capabilities towards an eventual full-system Fall Validation Demonstration (FVD) at the end of the semester. The plan tests specific subsystems against relevant metrics to confirm reasonable operating performance. Additional V&V testing will be performed between conclusion of these tests and the final demonstration to improve system robustness and performance. Below is the schedule and full document of the test plans.
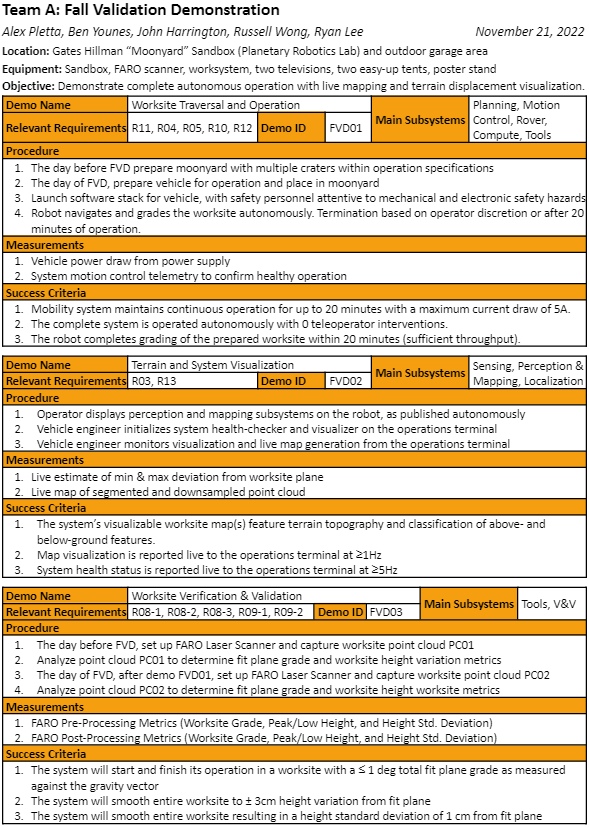
Fall/Final Validation Demonstration
The Fall/Final Validation Demonstration will be held in late November 2022 and attended by MRSD program supervisors, project advisors, and other stakeholders. This demonstration will show full system functionality for autonomous navigation and grading of the entire worksite. Multiple craters will be used of various sizes. All system requirements will be satisfied by this stage, and the demonstration will highlight the robust operation of the system to attendees. Below is the overview and summary.
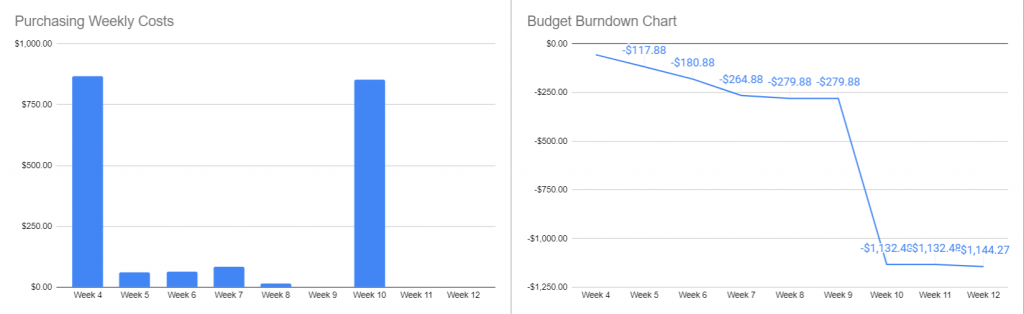
Parts List
This project has worked hard to leverage existing resources at CMU and from project stakeholders. See the full list of purchased/acquired. Note that this spreadsheet is an ongoing document used to order and inventory parts as they arrive.
Issues Log
Issues are logged either as information associated with Jira tasks, as Jira bugs, or in more serious cases in a spreadsheet to document the cause and resolution of the issue. See here for the issues log spreadsheet.
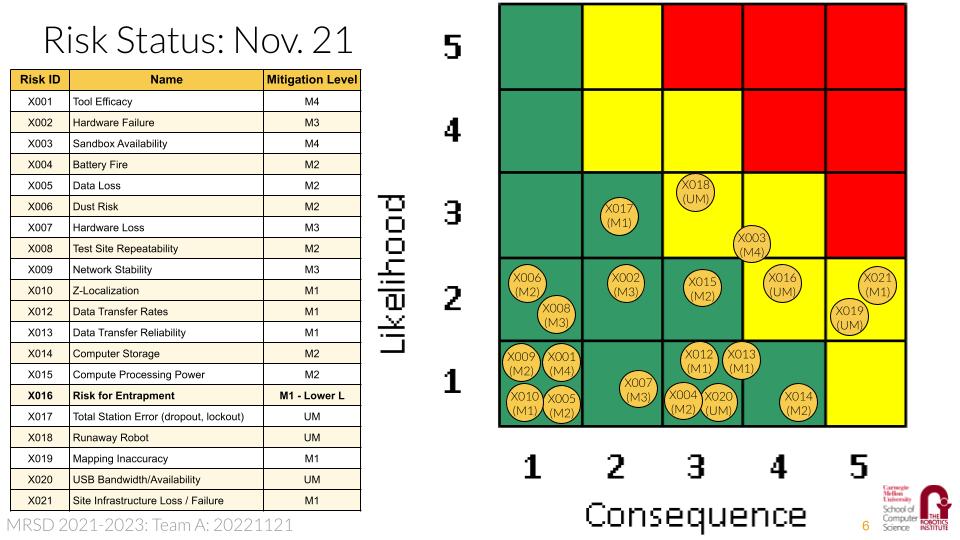
Risks Log
Risks are incrementally added throughout the project and have a corresponding one or multiple risk mitigation strategies. Pre-mitigation, the risk levels are estimated (Unmitigated Severity – UMS and Unmitigated Likelihood – UML). Post-mitigation, the mitigated risk levels are measured (Mitigated Severity – MS and Mitigated Likelihood – ML) See here for the risks tracking spreadsheet.