
Progress Review 1
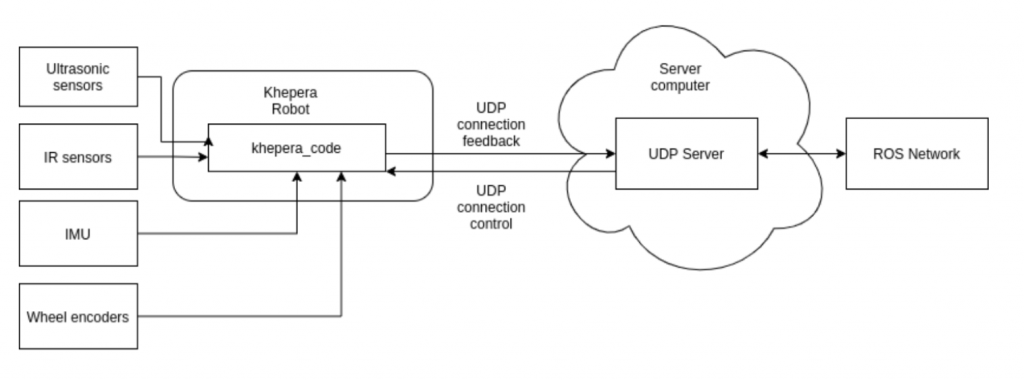
Agent-Server Communication: Established communication of sensor and command data, used protobuf format to package sensor data efficiently, stress tested system for data loss.
Mapping/Localization: Read and publish laser scans, converted encoder ticks to odometry, chose slam_toolbox as mapping package, integrated sensor readings and slam_toolbox, mapped environment with teleop.
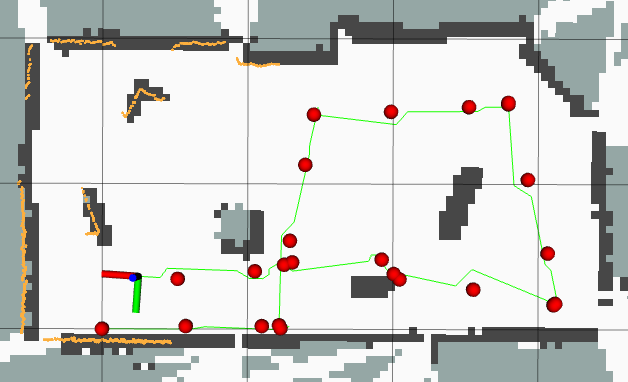
Navigation Stack: Set up ROS navigation stack, robot able to autonomously navigate to waypoint, mapped environment by sending waypoints.
