
Progress Review 3
Localization:
- Extended localization to operate with multiple robots
- Designed mount for LIDAR sensors to Kheperas
- Adjusted architecture to support agent specific frames and transforms
- Adjusted VICON test setup to get better ground truth
- New localization performance: 5.88 cm RMS
- Tested localization performance with 3 agents in system
- Performance did not degrade: 5.02 cm RMS
Task Generation:
- Added Manually generated tasks in RViz

Task Allocation:
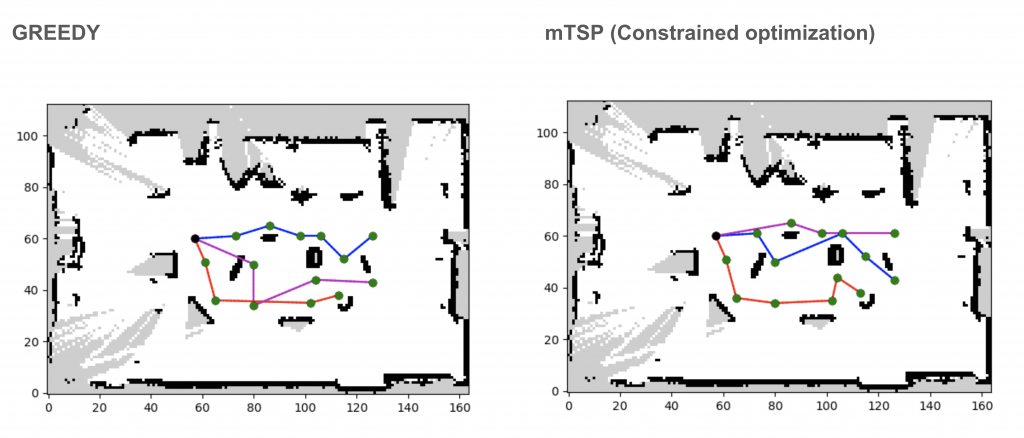
- Upgraded greedy task allocation to Multiple Traveling Salesman Problem (mTSP) formulation
- Used constraint optimization library: Google OR-Tools
- Set up as a mTSP and solved it as an optimization problem
- Integrated allocator with the current system interest areas in the map on Rviz
- Use GUI to manually specify
- TA takes those points, makes a graph and uses the weighted graph to assign tasks
- Every time the robot finishes a task, a new task is assigned
Path Planning:
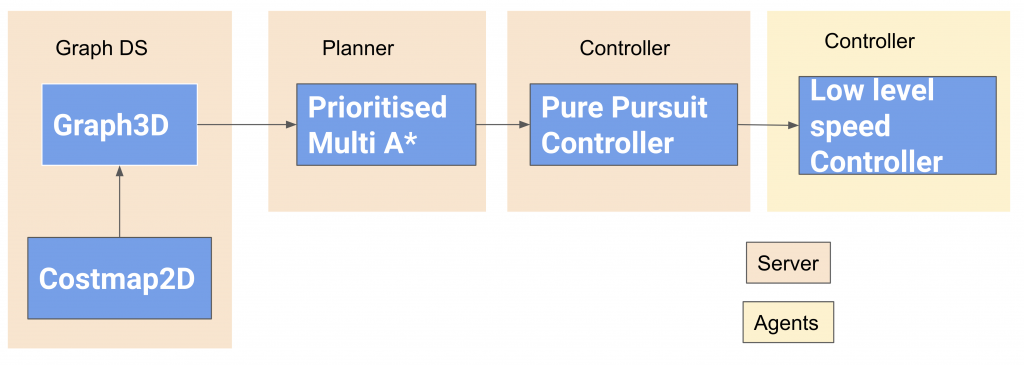
- Modular plug and play design -> allows debugging, reusability and future R&D
- Separation of concerns between different modules also allowed easy work allocation and testing
- Implemented prioritized A*
Fleet Management System:
- Created ROS Service to post agent data on the service for any client / sub-systems to call it and access it
- Bifurcated the communication into a service call and a ros topic which informs the other subsystems of any change in robot status
- Fixed some bugs in the bringup code