Progress Review 4
Localization
- Got agents to connect to CMU-DEVICE WiFi, enabling testing outside VICON area
- Borrowed WiFi router from lab to avoid network issues on CMU-DEVICE
- Tested robots in NSH basement and FRC
- Relocated testing to Scott Hall, which has polished floors
- Generated map of Scott Hall and tested localization
- Recorded data and tuned localization parameters
- Localization now works reliably
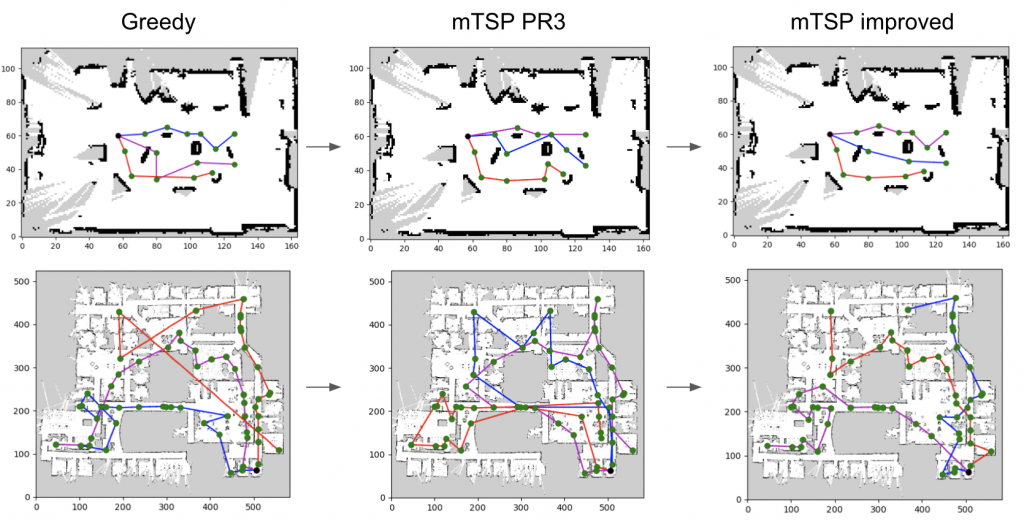
Task Allocation
- Improved optimality: avg 28.8% lower objective value than greedy
- Downsampled map occupancy grid to for faster A*
- Fully connected graph for more accurate costs
- TSP -> Hamiltonian path formulation
- Increased time for local search with metaheuristics
- Created fleet update feature
- Recomputes optimal allocation if fleet size changes
- Integrated with system
- Update active agents and tasks via service call
- Get all map information from ROS topic
Path Planning
- Spatio-Temporal A*
- Prioritized planning for each robot
- Planning in time to avoid robot-robot collision
- LG Control
- Custom controller to follow global trajectory
https://drive.google.com/file/d/16bkaGS6nz5thRhFPEA0g9kCvj7MPV8tR/view?usp=sharing
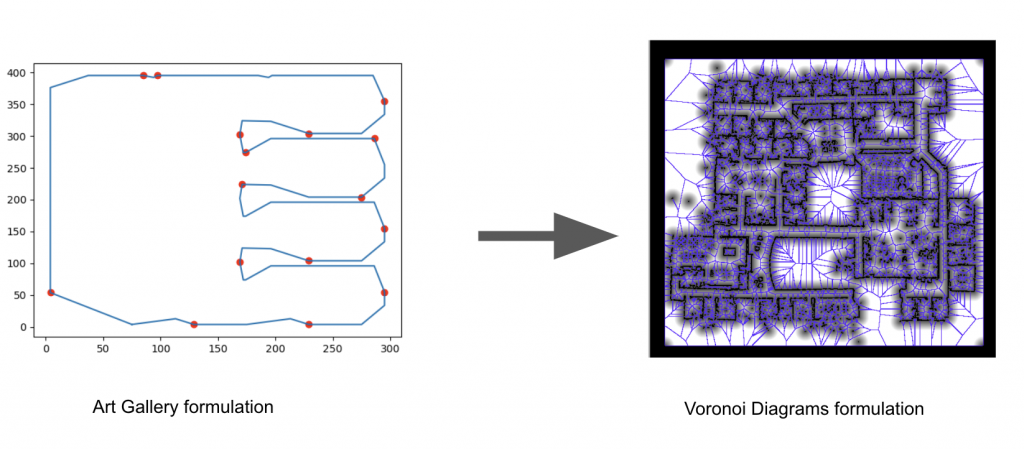
Task Generation
- Tested out art gallery formulation
- Doesn’t seem to be most suitable for our applications, will be pivoting to Voronoi diagrams