Perception
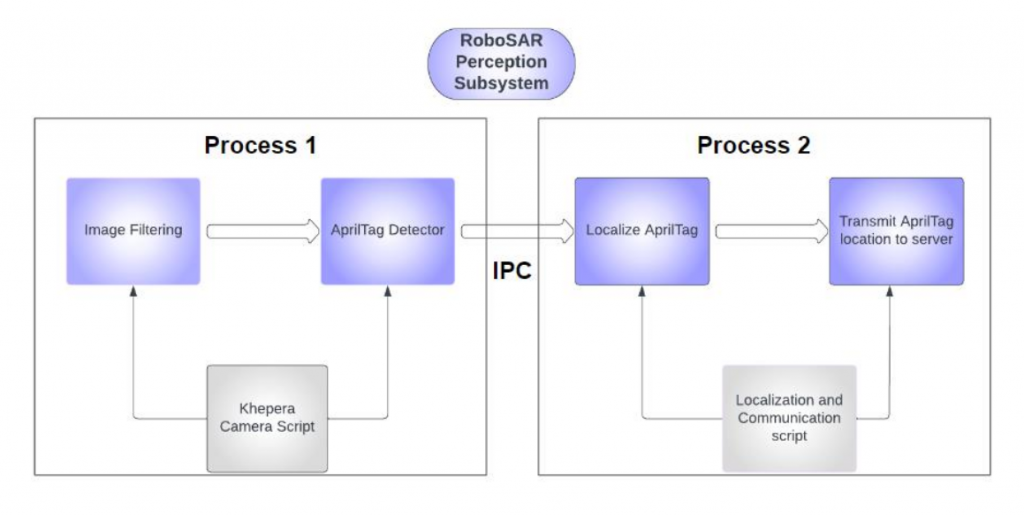
- The perception subsystem identifies victims in the environment which are modeled as AprilTags. It runs on each robot and takes in sensor data from the robot’s camera. It filters the images and constantly runs an AprilTag detection algorithm.
- Image processing and detection happen at a low frequency, so the architecture is separated into two processes.
- Once a victim is identified in the environment, the primary process is informed of the detection using inter-process communication. The position of the victim is then reported to the GUI.
- The total count of victims found as well as the time at which each victim was found is captured at the GUI.
- Search behavior is also incorporated, to perform a 360-degree rotation at each coverage task to maximize the chances of finding victims.