Progress Review 10
MRSLAM
- Added check before correcting odometry with laser scan
- Added mutex’s to make algorithm multi-threading safe
- Adjusted raytrace behavior to avoid generating free-space due to sensor limitations
- Still investigating erroneous scans being added to map

Navigation
- Added repulsive forces when robots are within a repulsion zone
- using an inverse cube of distance
- When robots are within a repulsion zone, robots are assigned a repulsive velocity.
- Testing it with the robots introduced a lot of bugs because this is another velocity component added on the robot along with the velocity obstacle.
- Tuning the parameters for velocity obstacle
- Implemented search behavior in robot after it reaches a goal based on the type of goal specified.
- Robot rotates in place and tries to detect a victim.
- Not using it right now because we are discussing other ideas.
Task Allocation / Generation
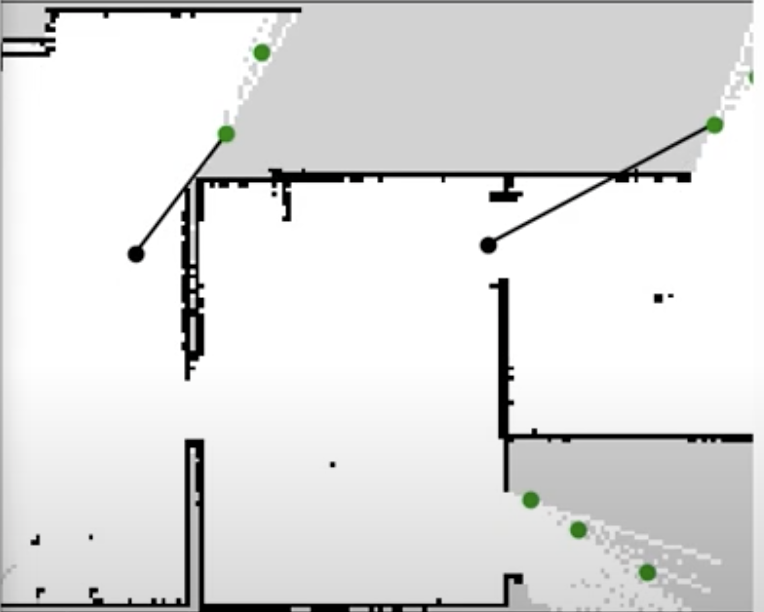
- Improvements to RRT Frontier Exploration
- Filtering frontiers based on information gain
- Tuning hyperparameters: RRT branch length, sampling frequency, info gain threshold
- Making frontiers more stable: saving previous frontier centroids and adding to current frontier list to be reclustered + filtered
- Integrating frontier tasks with task allocator
- Greedy task allocation based on distance
- Greedy allocation sends robots to not globally optimal tasks
- Work on market-based task allocation
- Use A* path costs instead of euclidean