
Progress Review 8
GUI
- Mission control GUI implemented with PyQT5
- Displays:
- Agent status: active, battery, feedback frequency, IP
- Task allocator visualization
- High-level system metrics: # active agents, # tasks completed, # victims found
- Mission timer
- User controls: start, stop, homing
- Integrating with system
- Changed architecture of task allocator to be wrapped in new MissionCommander object
- Getting battery, feedback frequency
- Challenging figuring out PyQt GUI design quirks

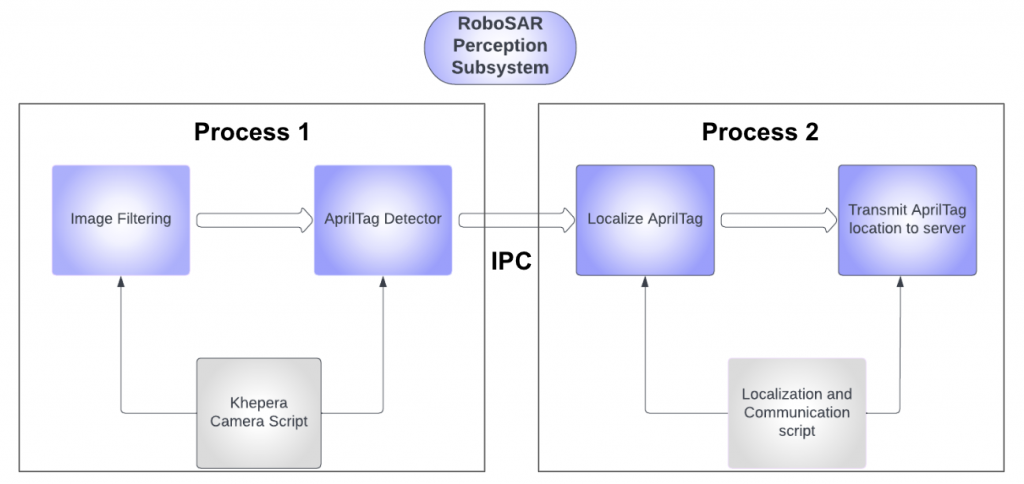
Perception
- Goal of the subsystem : Detect victims (dummied as apriltags) and report relative pose to the server for localisation
- Runs on every robot in the fleet!
- Able to detect apriltags at < 4m distance
- Challenges:
- Latency of image capture with sufficient resolution ~ 1sec
- Mass deployment of software (like all our other software) isn’t possible in the fleet because of camera calibration
- Associating apriltag detections with our dynamic pose graph! Perception x MrSLAM subsystem!
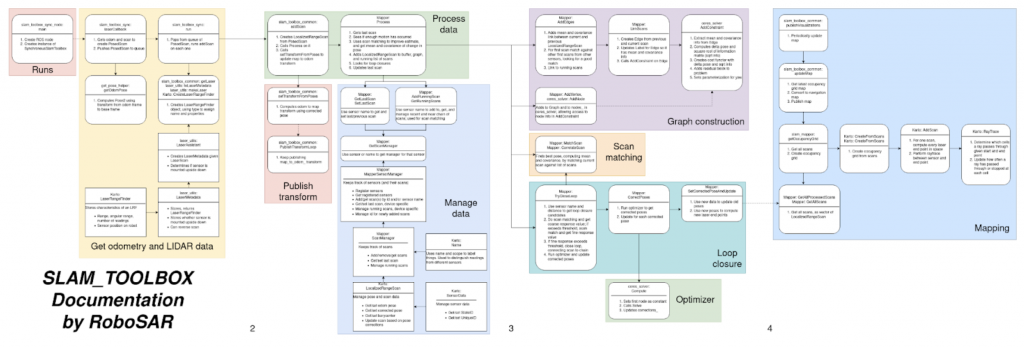
MRSLAM
- Initial research on how to extend slam_toolbox to be able to do multi-robot SLAM
- Understanding slam_toolbox codebase and open issues
- Working prototype in Gazebo sim
- Added capability of multiple lasers
- Since robots will start in same room, they will know relative initial positions
- Build single pose-graph for all agents
- Visualization of built graph + constraints
- Loop closure tests look successful

Navigation
Lazy Traffic Controller
- Our new centralised multi-robot controller
- Converts 2D paths into feasible collision free velocities for each robot in the fleet
- Lazy:
- Each robot has a narrow neighbourhood used for collision detection
- Avoid collision checking unless something detected in this neighbourhood
- Collision avoidance with velocity obstacles
- Traffic:
- Couple preferred velocities with attractive and repulsive forces to adopt swarm behaviours
- Controller:
- Generates velocities for the robots to execute!
- Initial research into velocity obstacles
- Model khepera robots as discs
- Transform these discs to the velocity space for each robot : this is a velocity obstacle
- Choose feasible velocities for each robot outside these velocity obstacles closest to the preferred velocities

