Progress Review 9
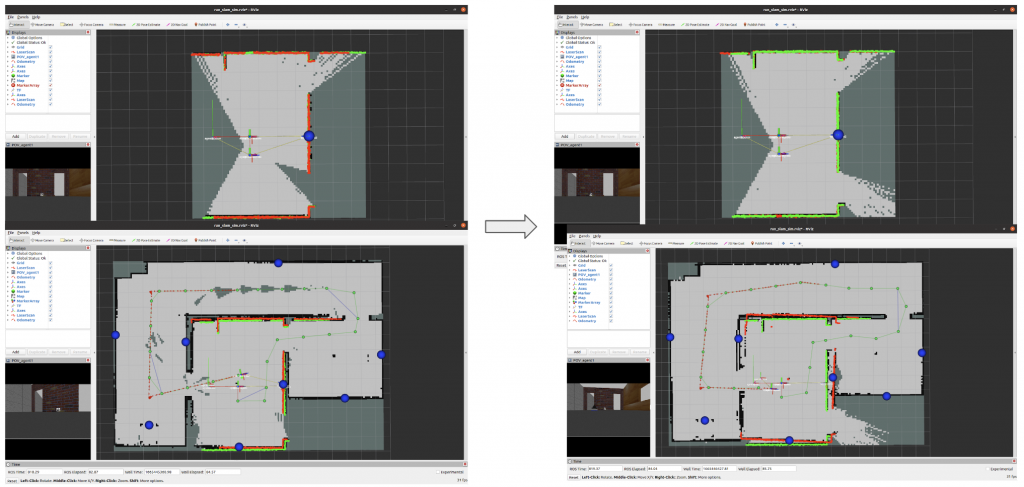
MRSLAM
- Testing and tuning in real life
- Initial testing with 4 robots – identified initialization issue
- Modified Ray Casting behaviour to fill in all free areas
Navigation
- Hardware testing for Lazy Traffic Controller
- Tune the controller velocity calculation frequency to the execution frequency of the robots
- Since differential drive robots don’t immediately achieve commanded velocity, use feedback velocity (calculated from change in position of the robot) for velocity obstacles calculation
- Addition of new term in cost function while scoring velocities to reduce oscillations
- float penalty = RVO_SAFETY_FACTOR / min_t_to_collision + dist_to_pref_vel + dist_to_cur_vel
- Static obstacle avoidance
- Latencies in real life / localization errors causes robots to sometimes collide with obstacles
- Adding static obstacle avoidance increases robustnesses and prevents crashes

Task Generation
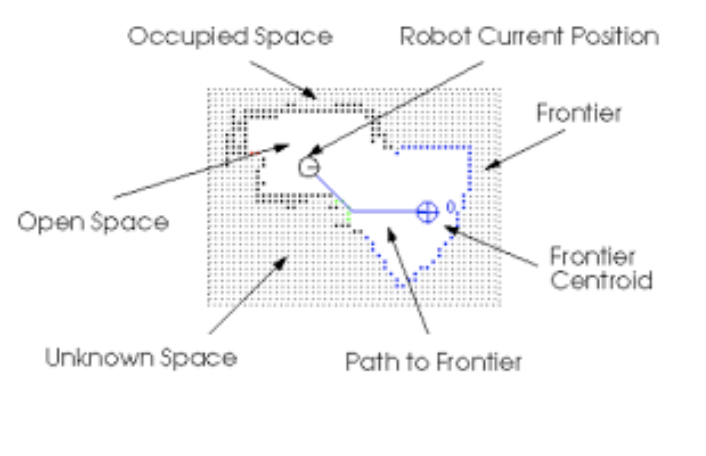
- Frontier Exploration
- RRT-based frontier generation
- RRT expands from robot starting position into free space
- When a node connects into unknown space, it is considered a frontier
- Possible frontiers are then clustered and filtered to prevent redundancies
- Challenges:
- Improve filtering based on information gain
- RRT does not update with map loop closures
- How does this scale to larger maps?