
FVD
System Features
- Collaborative mapping and localisation through information sharing
- Parallelising search using efficient Task Allocation
- Cooperative navigation and swarm intelligence
- Detect and report humans
MRSLAM
- Lidar “blowout” bug: solved by detecting blowout when laser readings are all bigger than a certain value, mitigated by restarting LRF module
- Spinning odometry bug: solved by making yaw range (-pi, pi] instead of [-pi, pi]

Perception
- Search behavior refinement
- Increase rotations for robustness
- Manual camera focusing pipeline

Task Generation
- Bug fixes for coverage task generation:
- Sometimes redundant tasks still generated
- Tasks sometimes not generated in small rooms, decreased minimum task size
- Visualization improvements
- Task heatmap
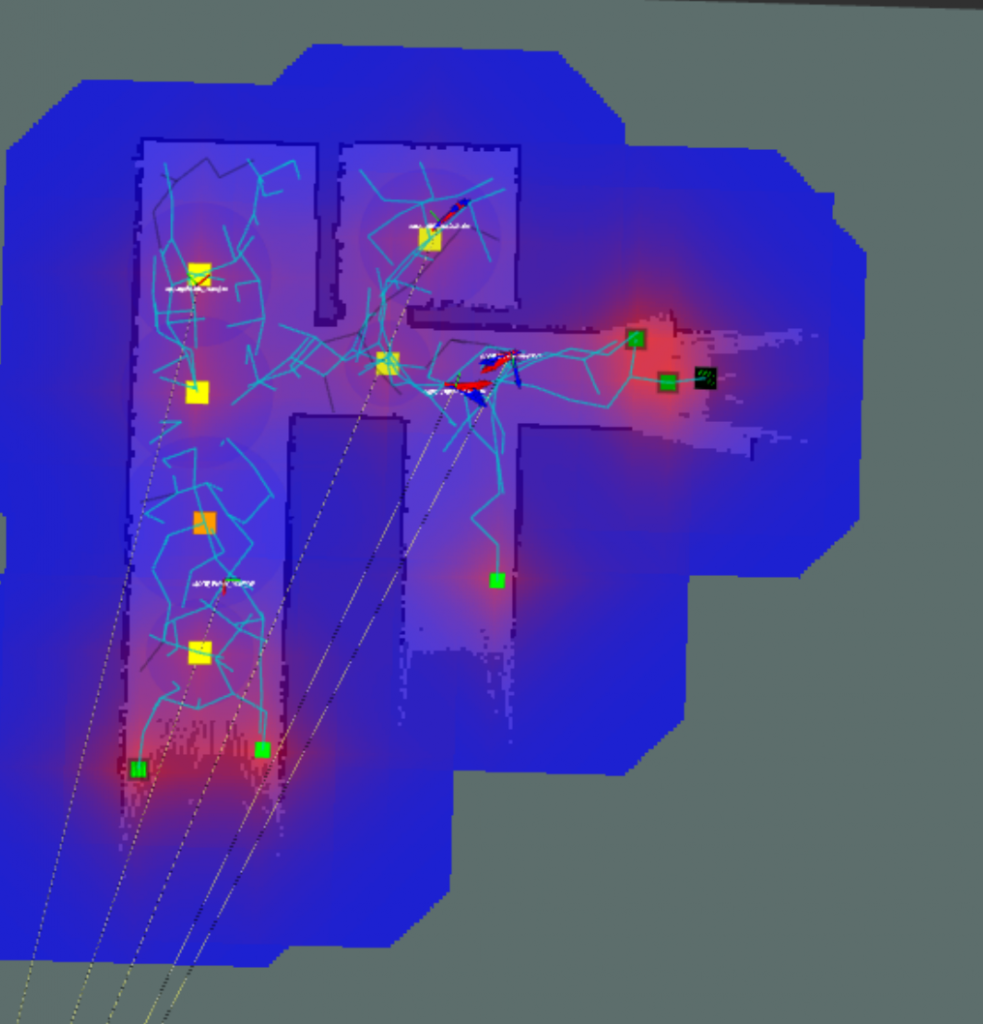
Task Allocation
- Greedy/ Naive allocator does not explore the map fast enough (stays too close to the home for too long) -> wastes precious time
- Lack of big picture view leads to inefficient task allocation!
- Greedy/ Naive allocator wastes too much time in low information areas
Can we model information gain in the environment and exploit that to achieve better performance?
- Coverage Tasks which have been crossed before have low information
- Bigger frontiers have more information than smaller frontiers
- As search progresses information flows from frontiers to coverage tasks
NEW MORE OPTIMAL TASK ALLOCATOR !
HIGH (Hierarchical Information Gain Heuristic) Allocation
- Information-theoretic approach: task weight is encoded by its information gain
- Balances exploration vs exploitation with weights based on explored area
- HIGH on average obtains a 16% better life score (sum of times) than Naive


Navigation
- Continued IRL testing + finetuning

Fleet Management System
- LEDs to indicate detected victim
- Bugfix: template not killed cleanly
- Bugfix: Agent bringup bad data
Simulation
- Setup Stage Sim with Pseudo-Apriltags to run experiments