
FVD Encore
New features: Ability to add an agent to the fleet mid-mission New and improved HIGH task allocation: HIGH2 Better task...

New features: Ability to add an agent to the fleet mid-mission New and improved HIGH task allocation: HIGH2 Better task...

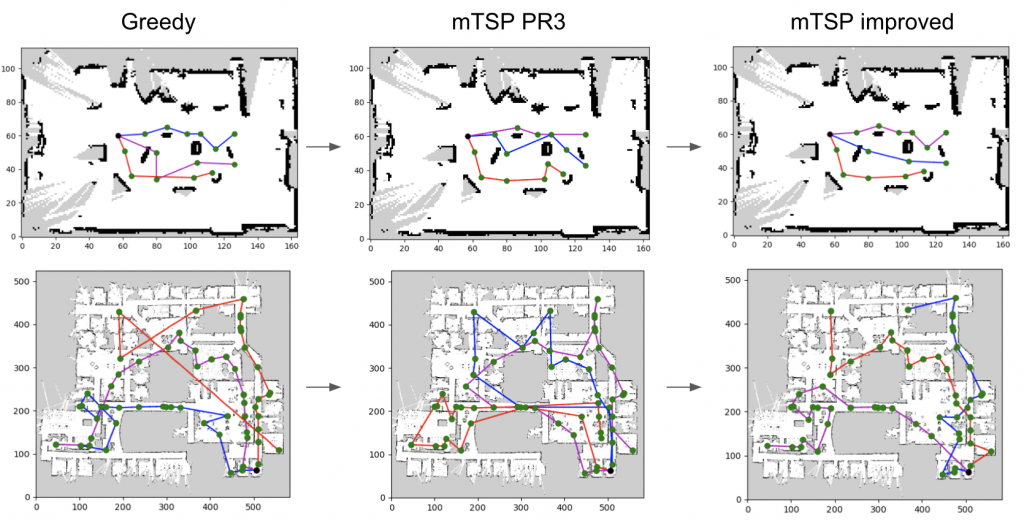
System Features Collaborative mapping and localisation through information sharing Parallelising search using efficient Task Allocation Cooperative navigation and swarm intelligence...

Fleet size: 5 robots!! Perception Perception subsystem is now integrated with rest of system Increased resolution Cameras need to be...

MRSLAM Added check before correcting odometry with laser scan Added mutex’s to make algorithm multi-threading safe Adjusted raytrace behavior to...
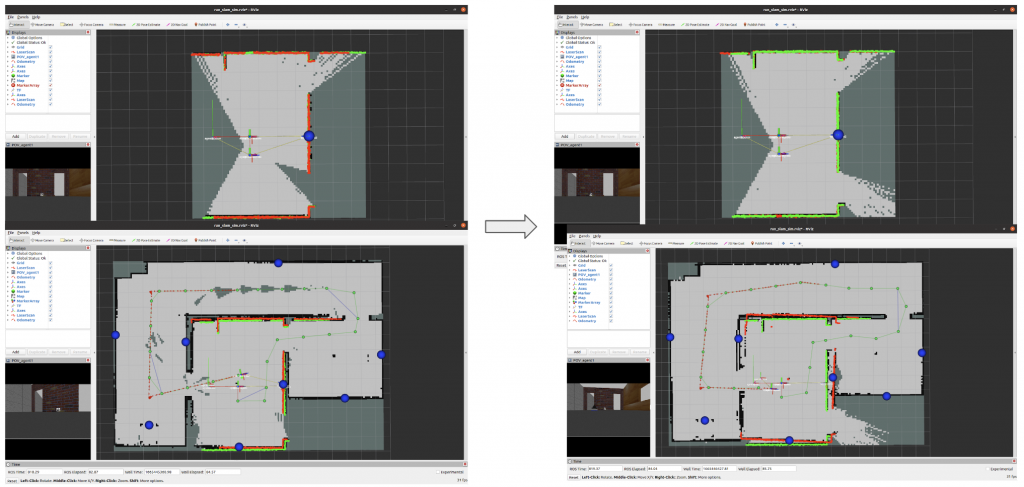
MRSLAM Testing and tuning in real life Initial testing with 4 robots – identified initialization issue Modified Ray Casting behaviour...

GUI Mission control GUI implemented with PyQT5 Displays: Agent status: active, battery, feedback frequency, IP Task allocator visualization High-level system...
Project Management Schedule FVD scope Subsystem reorganizations, re-assigning subsystem leads Initial research on new features: Multi-robot SLAM Heterogeneous task allocation...
Localization Got agents to connect to CMU-DEVICE WiFi, enabling testing outside VICON area Borrowed WiFi router from lab to avoid...

Localization: Extended localization to operate with multiple robots Designed mount for LIDAR sensors to Kheperas Adjusted architecture to support agent...

Localization: VICON data was saved to rosbags and used to tune hyperparameters of SLAM Toolbox Single-robot localization is fairly robust ...