
GUI
Then Mission Control GUI is a user interface where the user running the mission can monitor and interact with the...
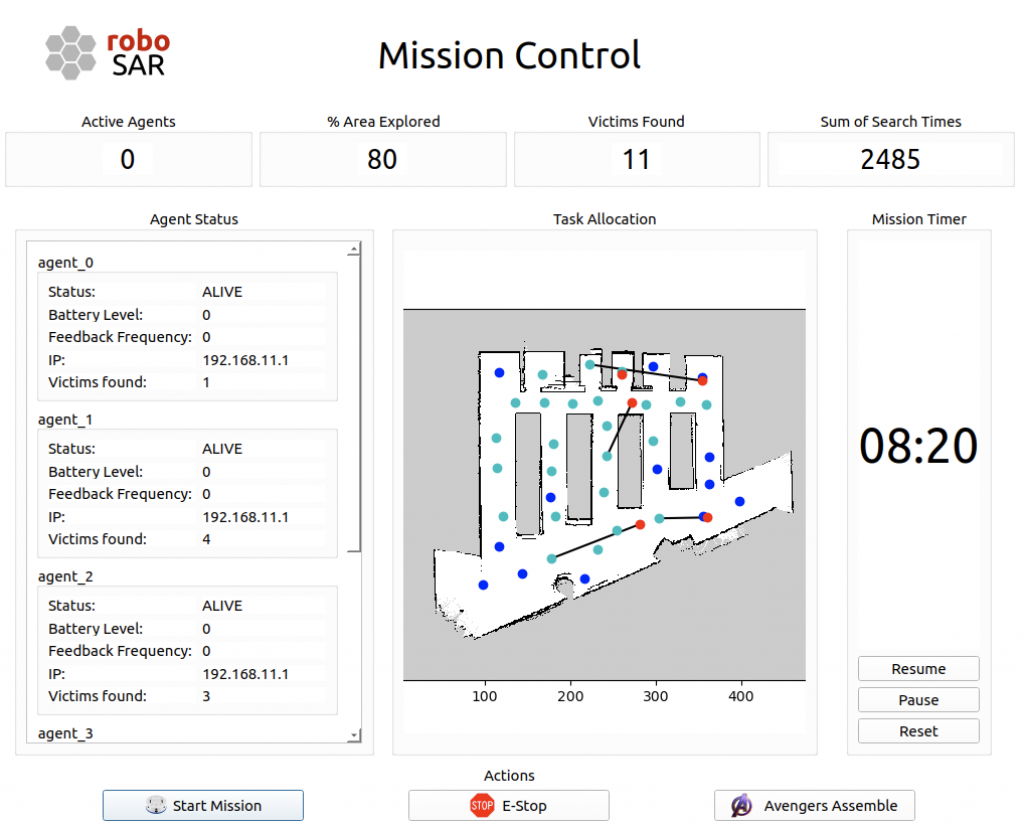
Then Mission Control GUI is a user interface where the user running the mission can monitor and interact with the...
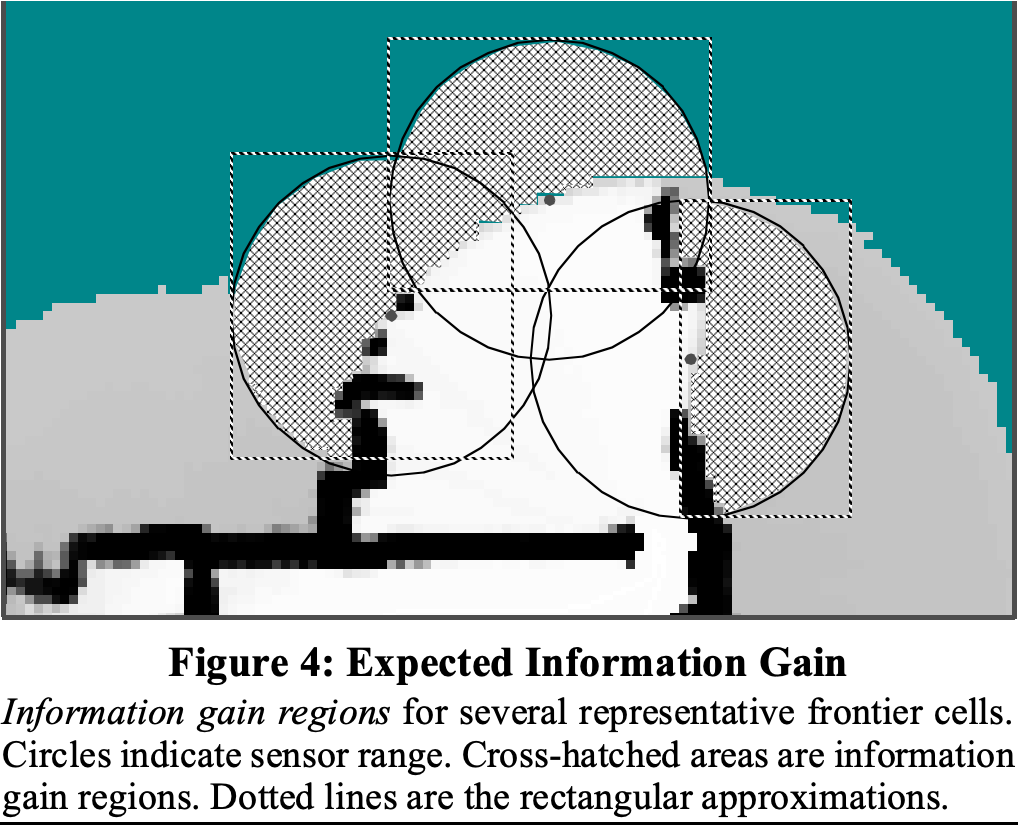
Now that we are performing search in an unknown environment, we: Need to be able to generate interest points that...
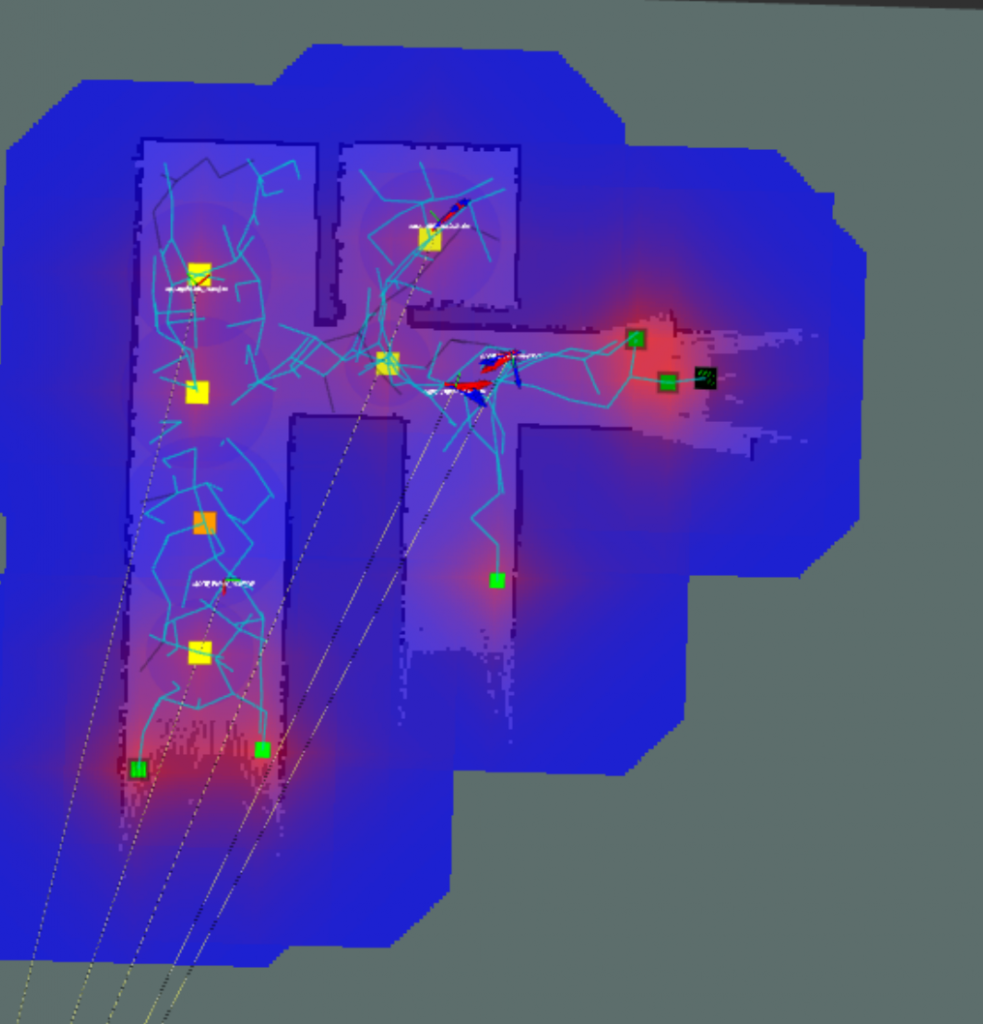
The task allocation subsystem efficiently assigns each robot tasks such that all tasks are completed in minimal time. Inputs Outputs...

The fleet management system (FMS) communicates with the agents and monitors their status. It is responsible for establishing socket connections...

The navigation subsystem takes in the current poses of the robots, and their assigned tasks, as well as a map...
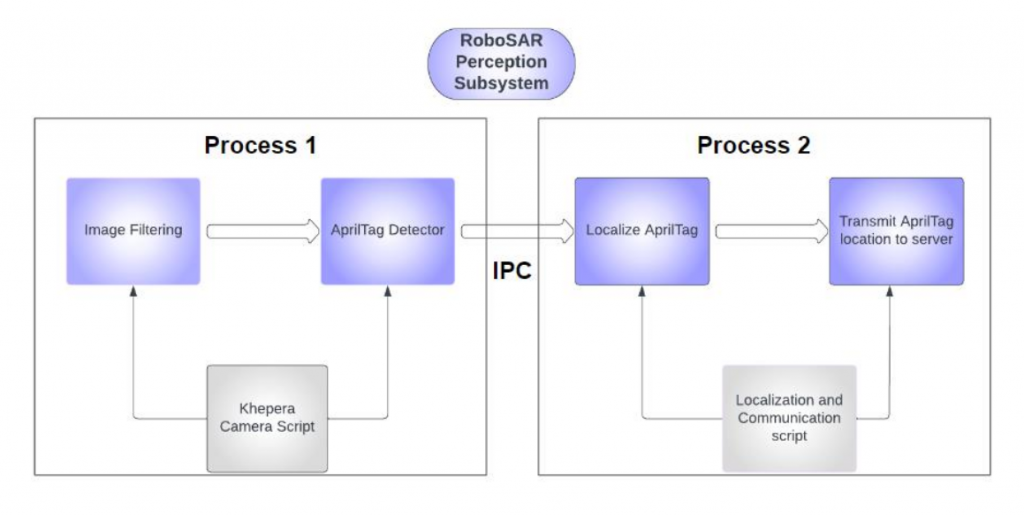
The perception subsystem identifies victims in the environment which are modeled as AprilTags. It runs on each robot and takes...

MRSLAM localizes the agents and generates a map of the environment. MRSLAM is an extension of SLAM Toolbox package to...