
Fleet Management System
The fleet management system (FMS) communicates with the agents and monitors their status. It is responsible for establishing socket connections...

MULTI-ROBOT SEARCH AND RESCUE
Autonomous search and rescue of victims in an indoor environment using a multi-robot team


The fleet management system (FMS) communicates with the agents and monitors their status. It is responsible for establishing socket connections...

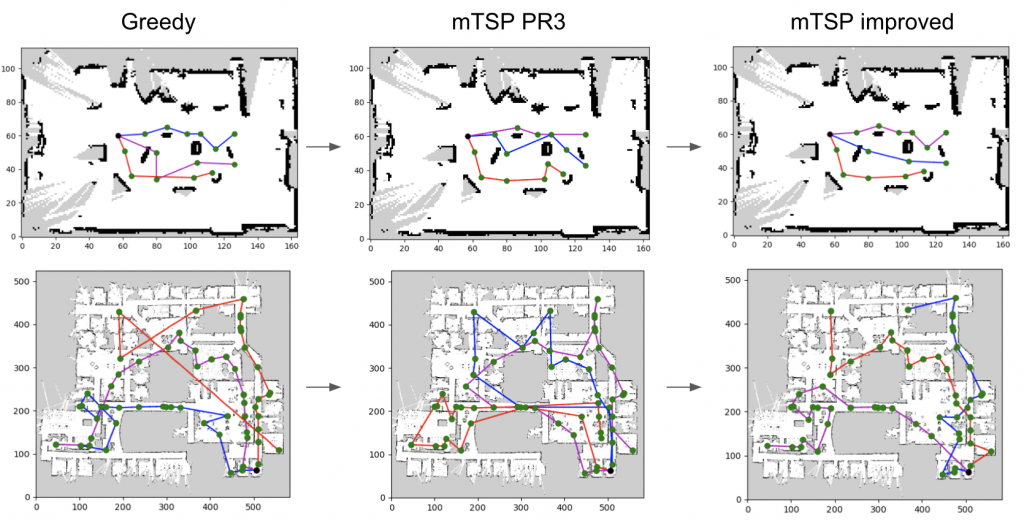
The navigation subsystem takes in the current poses of the robots, and their assigned tasks, as well as a map...
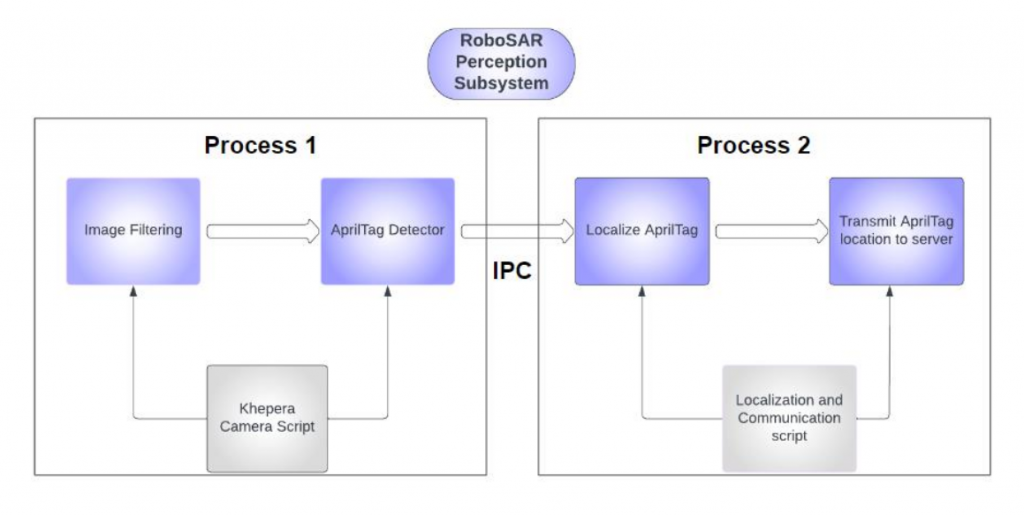
The perception subsystem identifies victims in the environment which are modeled as AprilTags. It runs on each robot and takes...

MRSLAM localizes the agents and generates a map of the environment. MRSLAM is an extension of SLAM Toolbox package to...

Localization The localization subsystem determines pose of an agent given a map of the environment. Inputs Output Initial estimated pose...
https://docs.google.com/document/d/1SwSAmtAW9RJ9X06YcqWmJ71yoZxVCfoflpW3B0n13vs/edit?usp=sharing
https://docs.google.com/document/d/1Z4DCiJLUHTahLuGdmpzz1kiS3Gew5aomL-UFecMa7JQ/edit?usp=sharing
Localization Got agents to connect to CMU-DEVICE WiFi, enabling testing outside VICON area Borrowed WiFi router from lab to avoid...

Localization: Extended localization to operate with multiple robots Designed mount for LIDAR sensors to Kheperas Adjusted architecture to support agent...

Localization: VICON data was saved to rosbags and used to tune hyperparameters of SLAM Toolbox Single-robot localization is fairly robust ...