
Progress Review 1
Agent-Server Communication: Established communication of sensor and command data, used protobuf format to package sensor data efficiently, stress tested system...

MULTI-ROBOT SEARCH AND RESCUE
Autonomous search and rescue of victims in an indoor environment using a multi-robot team

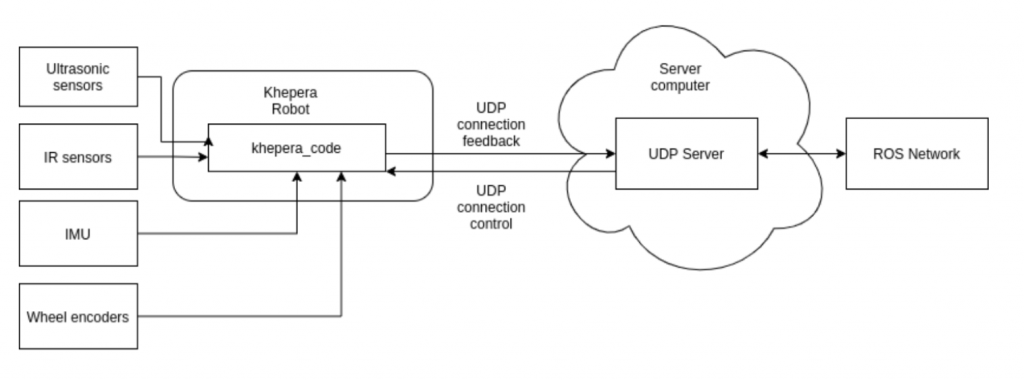
Agent-Server Communication: Established communication of sensor and command data, used protobuf format to package sensor data efficiently, stress tested system...
Main Objective: Achieving coordination, cooperation, and information sharing amongst multiple robots to minimize the time taken to find locations of...
Location: Scott Hall 3rd floor, in area leading to Hamerschlag Hall Equipment: WiFi router, Khepera IV robots with LRF modules...