Multi-Agent Search and Rescue
Active search and rescue (SaR) defines the problem of efficiently locating rescue mission targets in an unknown environment by interactively collecting data. Most existing active search algorithms are developed for a single agent and are not extendable to multi agent scenarios. Real world environments are unstructured and unbounded so robot swarms are useful to speed up search in SaR through multi-robot coordination in mapping and exploration.
Robot swarms are scalable in terms of fleet sizes, so they can easily adapt to various SaR scenarios with different environment sizes and conditions. Robot swarms also decrease the complexity of individual robots through skill sharing across the group of robots. SaR can often involve tasks which need robots to combine powers since they cannot be achieved by any one robot alone. Additionally, swarm intelligence is needed to navigate tight spaces and cluttered areas where groups of robots can become obstacles to each other during planning/navigation.
We will implement a system where a server allocates tasks for efficient search, maintains swarm formation control, and plans navigation paths for the robotic agents. The swarm of robots will be able to efficiently map, localize in, and search an environment for victims and report victim location to the user for rescue.
Use Case
There is a dangerous natural gas leak in a school on a working day. The alarm goes off throughout the school, and firefighters are called to come mitigate the situation. In the meantime, the school faculty evacuate the students from the building. However, when the teachers get to the evacuation site and do roll call, they find that they are missing some students. The first responders arrive and are tasked with locating the source of the gas leak and missing students in the school.
Time is critical and all students must be located and rescued before they are harmed by the side effects of the gas leak. However, there are not enough firefighters to tend to both injured students in the evacuation site, search for victims, and locate the gas leak. So, they use a fleet of autonomous search and rescue robots to aid them in locating victims.
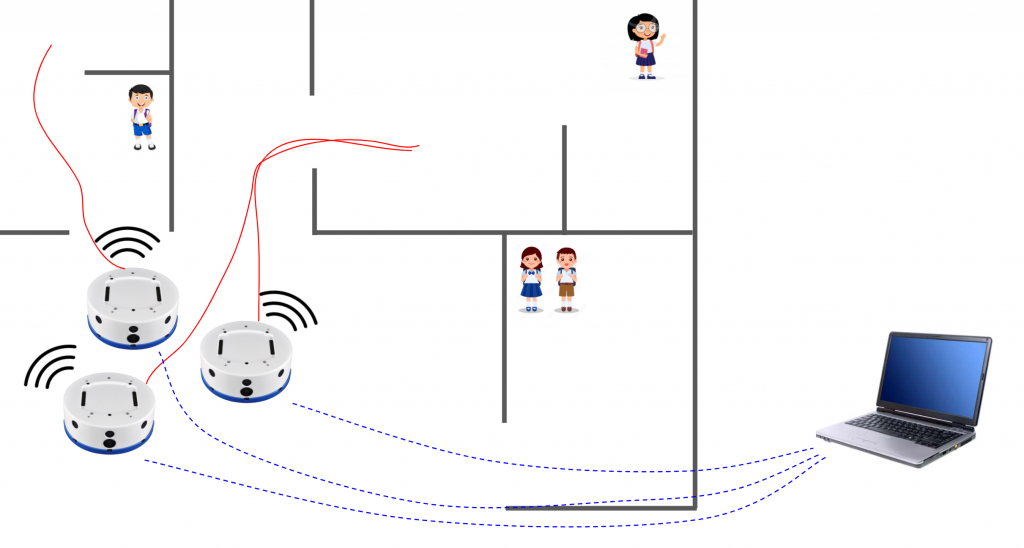
First responders deploy RoboSAR robot agents to search the school for students. Agents search the entire school whilst talking to each other and sharing information. The agents are unaffected by the effects of the gas leak, unlike the human first responders. They are able to efficiently search the environment using an optimal task allocation algorithm. Given a blueprint of the environment, the RoboSAR server generates a set of tasks or interest points. The agents all start at the entrance of the school, and are each assigned an interest point to search. Once an agent finishes searching an interest point, it is assigned a new task. If students are found at the interest point, agents report their locations to the first responders so that they can be rescued.
The agents then return to base after searching every room in the school.