Functional Requirements
| F1. | The system shall localize agents in a given map |
| F2. | The system shall route agents and avoid collisions |
| F3. | The system shall sense gaps and determine their feasibility |
| F4. | The system shall determine and achieve coupled configurations |
| F5. | The system shall cross gaps |
| F6. | The system shall reach given regions of interest |
Performance Requirements
| P1. | The system will deem gaps upto 1.5 agent lengths feasible |
| P2. | The system will have 0 unplanned collisions between agents |
| P3. | The system will achieve formations with at least 3 robots |
| P4. | The system will cross feasible gaps 75% of the time |
| P5. | The system will reach all POIs 75% of the time |
| P6. | The coupling mechanism will bear the weight of one agent |
Non-Functional Requirements
| N1. | The weight of an agent shall be minimal |
| N2. | The coupling mechanism shall consume a low amount of energy |
| N3. | The system shall be expandable |
| N4. | The system shall be easily maintainable |
| N5. | The team shall maximize learning and fun throughout the project |
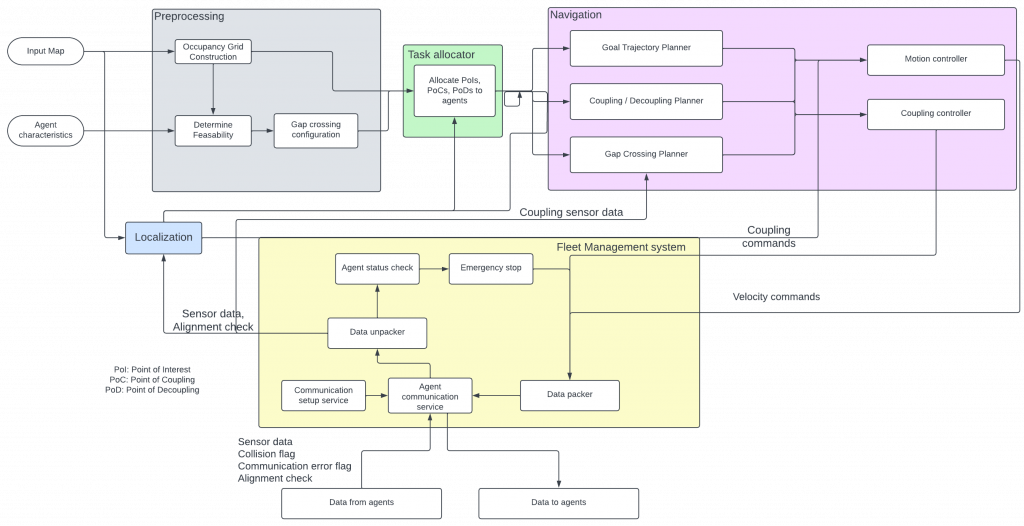
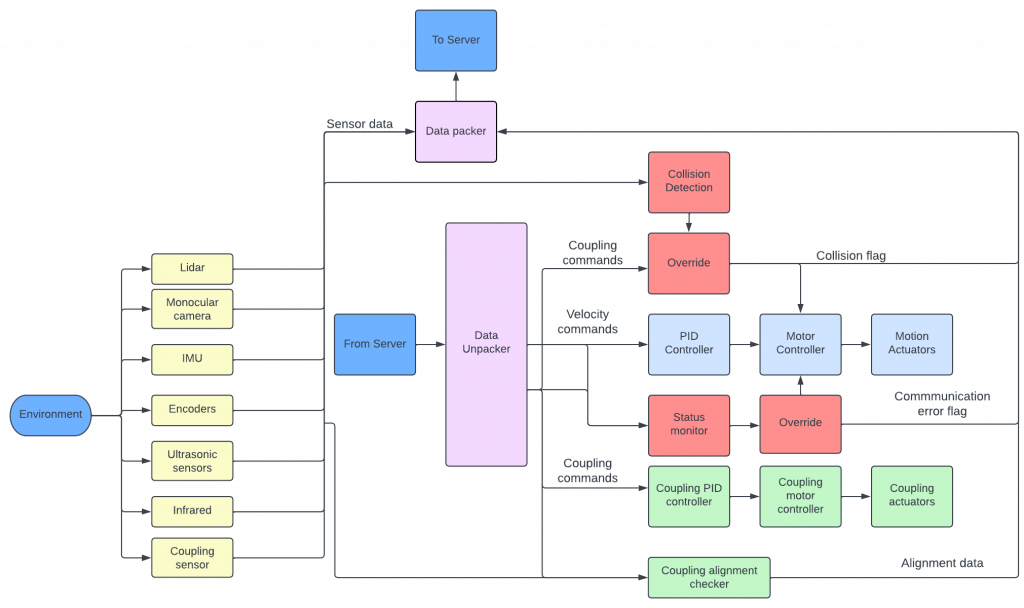
Functional Architecture
System
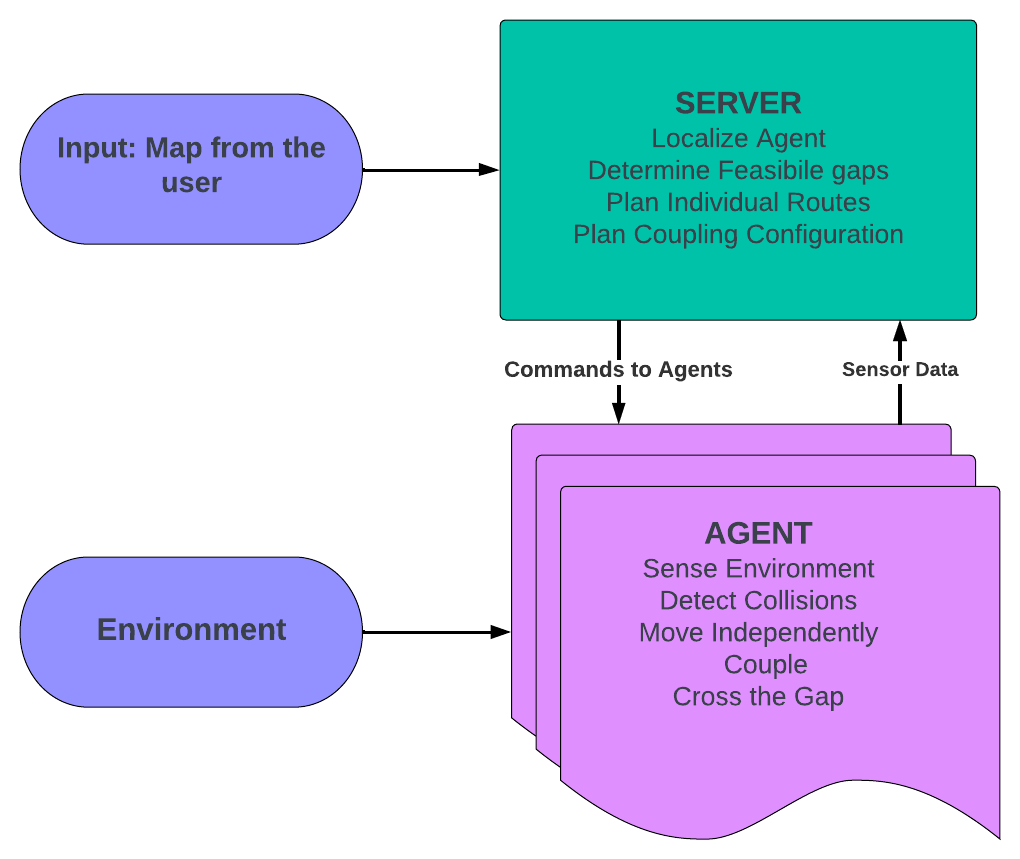
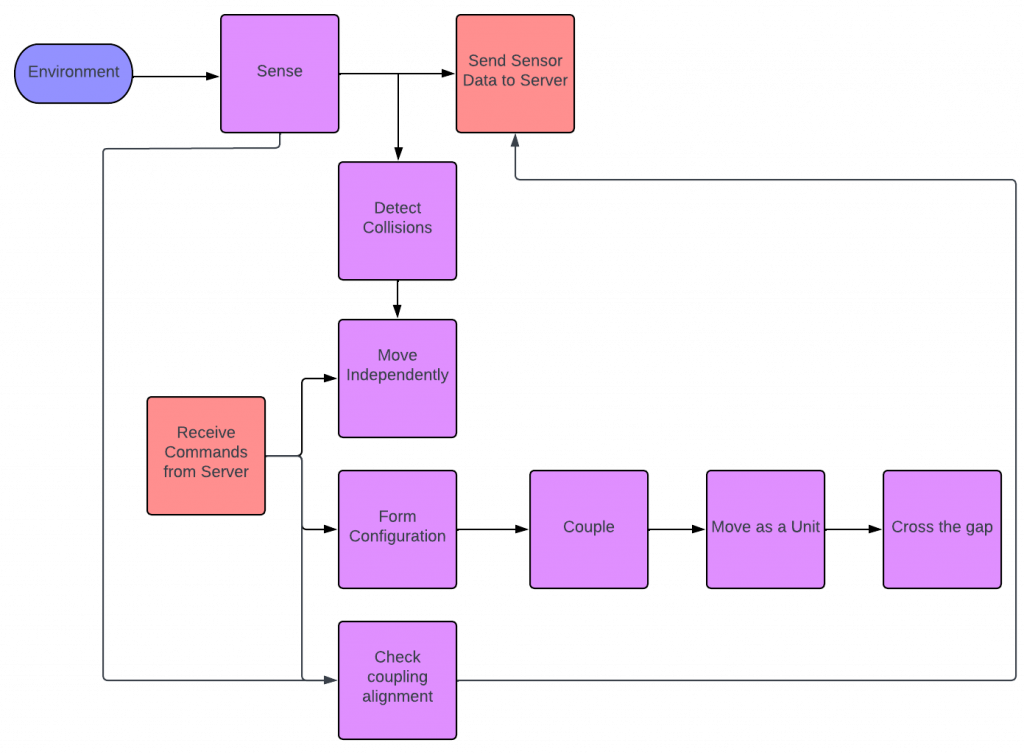
Agent
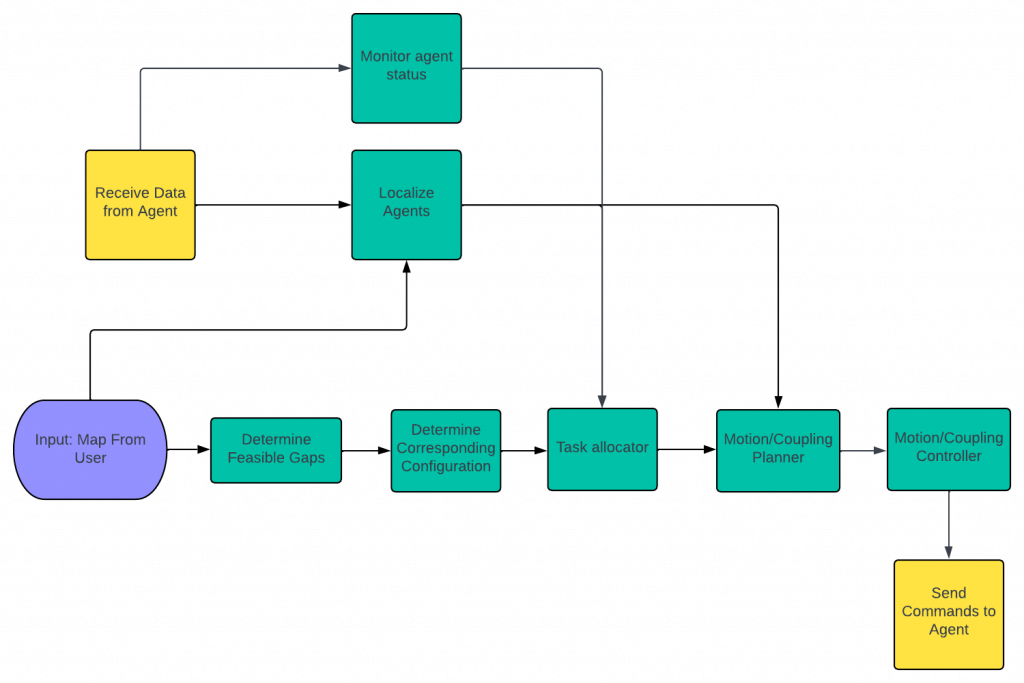
Server
Cyber-physical Architecture
Agent
Server