Autonomous Collaborative Ground Traversal of Discontinuous Terrain
Project Description
Robot swarms have been shown to improve the ability of individual robots through inter-robot collaboration. Introducing physical coupling between robots can extend their ability in an unstructured environment. This is particularly beneficial in inspection scenarios, especially in mines, where the environment is complicated and thus challenging. Instead of having the crew spend precious day hours inspecting several sites in a mine in person, they can deploy a swarm of robots to do the same in a more efficient and collaborative manner.
Rather than sending in a team of people for inspection at each site, it is more efficient to send a swarm of robots to collect more information at each point of interest to the crew. Each agent in the system will inspect a set of allocated points of interest, and once every point is made, they will return all the information to the end users, using which further plans can be made.
Previously, PuzzleBots was proposed for the same. It is a robotics swarm system where the robots can dynamically couple with each other to form bridges and decouple them to perform individual tasks but on a small scale. This system can either be used to build bridges for the transportation of other materials or to get the robots from one side of a gap to the other. The aim of this project is to investigate the physical coupling of robot swarms on a larger scale, as well as implement and test existing control and planning algorithms on a larger system.
Use Case
Consider a mine with several hotspots, where a hotspot is a location with high concentrations of mineral deposits. These minerals are of critical importance and the mining crew is on a time crunch. That being said, each hotspot in the mine must be inspected in detail before approaching the next steps.
Mines, in general, can be narrow, in caves, and can have cracks or fissures on the ground or other surfaces. Due to rugged terrains in such unstructured environments, traversing these conditions can be potentially risky for humans, e.g., collapse of overhead rock structures. The mining crew needs to inspect each hotspot but will lose out on time and need to find a better solution. An autonomous distributed solution.
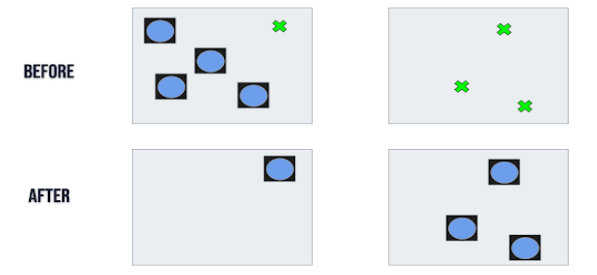
Bring in PuzzleBots. The crew inputs a blueprint of the map of the mine. This would typically be an occupancy grid of the mine with hotspots marked in them. All agents in the system start from the base station at the entrance of the mine. Each agent gets allocated hotspots optimally, and collision-free optimal trajectories are planned. The agents branch off from the swarm to inspect individual hotspots. In case of emergencies involving imminent collisions, each agent is equipped with a collision avoidance system. They spend a predetermined fixed amount of time at the hotspots before being allocated new ones.
It is very likely that hotspots are located across fissures in the mine, which will be referred to as gaps. Should there be any hotspots on either side of any gaps, the system determines the feasibility of getting there. If feasible, the system plans for a group of agents to physically couple with each other and cross the gap. After that, they split up, and follow their respective planned trajectories to inspect individual hotspots. After inspecting the entire map, the agents return to the base station.