All code has been developed under version control using GitHub. The software stack is in large part a ROS2 workspace written predominantly in C++. The code is deployed with a custom Docker container so the stack can be run on team developer laptops the same as it runs on the robot (except for the peripheral connections). The Docker images are also version controlled to maintain a stable development environment even with open-source code.
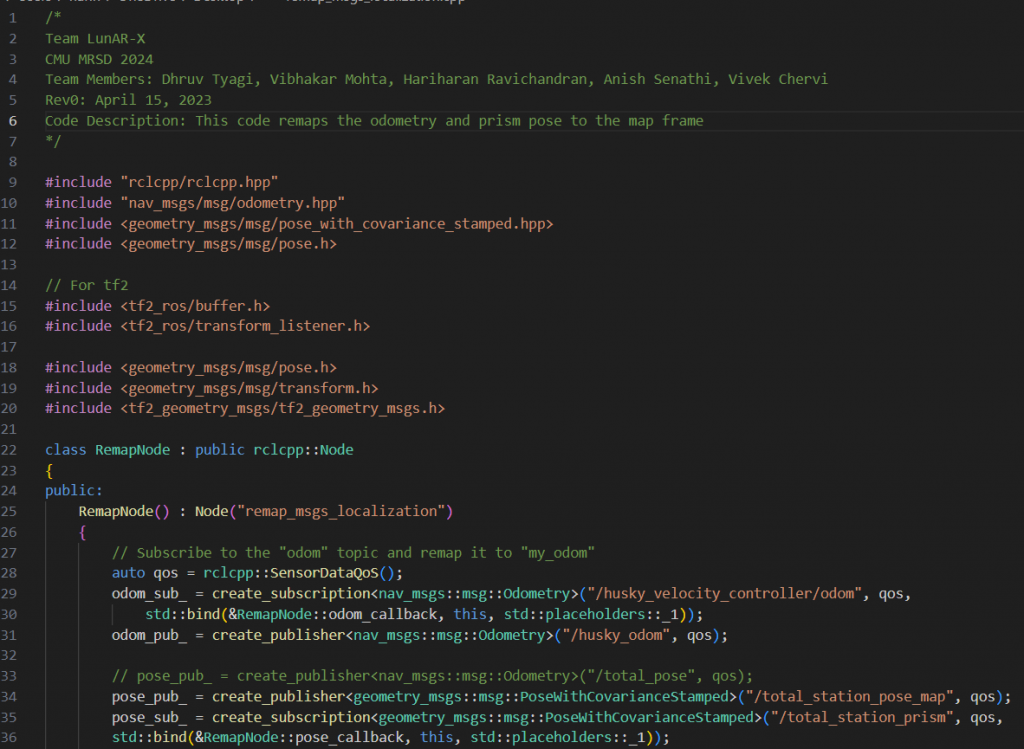
Example Code: