Preliminary Spring Schedule
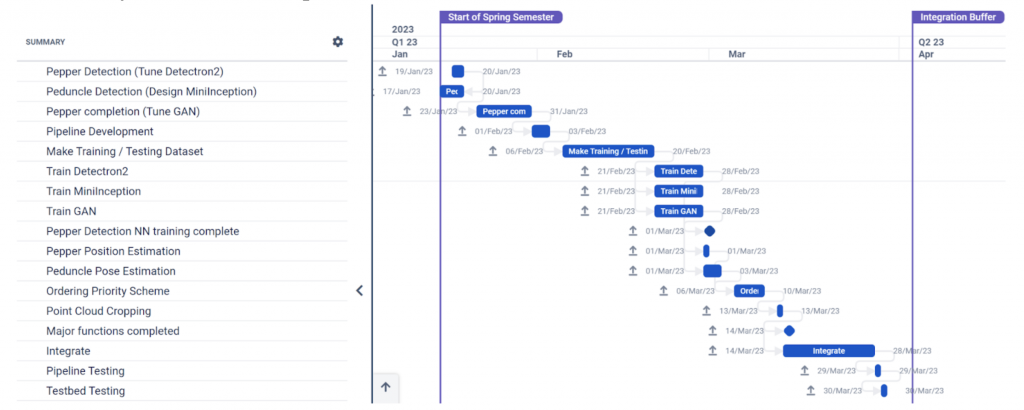
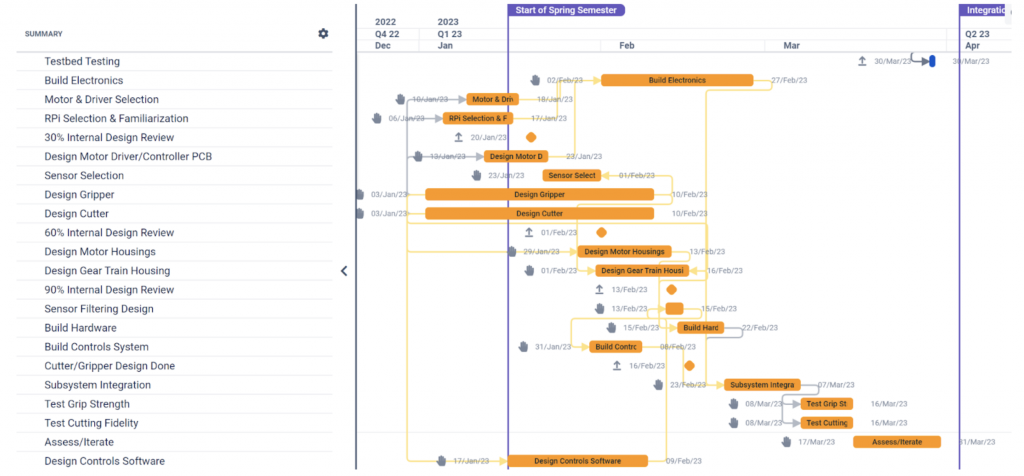
Using the work-breakdown structure, work package dictionaries, and task sequences/ dependencies, an initial schedule was developed which includes key internal and external milestones. The images below provide an initial overview of the schedule in the form of Gantt charts. The perception subsystem, end-effector subsystem, and motion planning subsystem all work together in parallel. These major subsystems should be completed three weeks before the spring validation demonstration to leave time for system-level integration and testing. The perception schedule mainly consists of finish-to-start dependencies, while the end-effector subsystem has more start-to-start dependencies. The motion planning subsystem is fairly linear with mostly finish to start dependencies.
External milestones captured in the schedules below include the preliminary design review (PDR) on 3/13/23, the spring validation demo/encore (SVD) on 4/19/23 and 4/26/23, the critical design review (CDR) on 5/1/23, Iowa on-site testing in early September, the system development review (SDR) in mid October, and the fall validation demo/encore (FVD) in November. Internal milestones were also set within each major subsystem. The internal milestones for the perception subsystem include having the pepper detection neural network training completed by 3/1/23 and having all major functions completed by 3/14/23. Internal milestones for the end-effector subsystem include 30%, 60%, and 90% internal design reviews on 1/20/23, 2/1/23, and 2/13/23, respectively. Also, the V1 gripper design should be completed by 2/16/23 before the gripper building phase begins. The motion planning subsystem’s internal milestones include having the planning software completed by 2/24/23 and also finalizing this subsystem by 3/10/23.
For the preliminary design review, the end-effector subsystem should have completed its first iteration of design and much of the perception pipeline should be built out. Additionally, all motion planning software should be completed. Thus, the team will be able to demonstrate the completed subsystem designs and initial subsystem competencies.
Perception Subsystem
End-Effector Subsystem
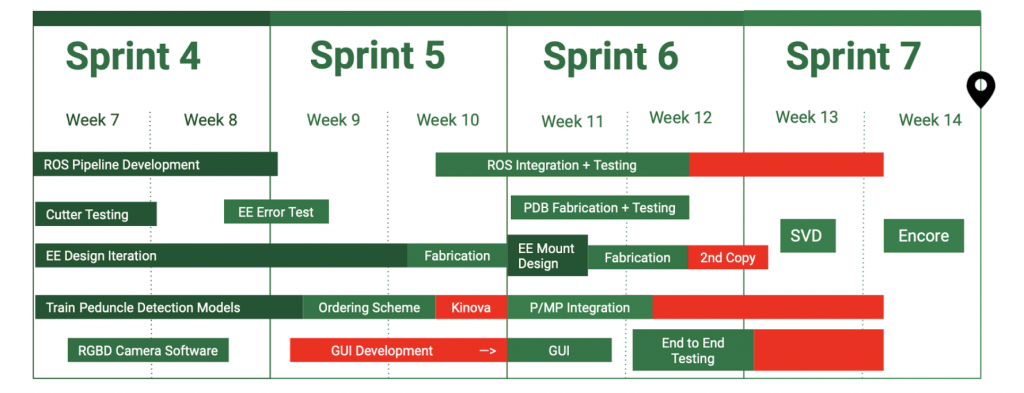
Motion Planning and Integration Subsystems

Note: Motion Planning Subsystem is featured in green and the Integration subsystem is in red.
Updated Spring Schedule
In terms of current project status, the delays that the team has faced since week 10 has led to the project being around a week behind, as the system is not currently at the level of reliability which we had envisioned. To summarize these delays, the team had hoped to begin perception and motion planning integration towards the middle of the semester, but were delayed by platform failures and transitions from 3 different manipulator arms over the course of the semester. The decision to use the current arm for SVD, the Kinova Gen3 6 DOF arm, was only made 3 weeks prior to the demo. There were also several unexpected bugs and issues to resolve during the integration period. The team also made a decision late in the semester to fabricate a second copy of the end-effector as a risk mitigation tactic for hardware failures. Given these delays, other aspects of the project such as GUI development were pushed back to prioritize system level shortcomings and end-to-end testing, and still need to be fully integrated into the system for proper manual intervention. These schedule adjustments have been summarized in the figure below.
Preliminary Fall Schedule
Looking towards the fall semester, the team has planned incremental capability milestones for the added system objectives of handling semi-occluded peppers and integrating mobility. These milestones and the team’s high level schedule for the fall have been summarized in the figure below. The first of these milestones include the setup of the fall validation demo (FVD) testbed as well as repeating the SVD test plan successfully to ensure that our system can reliably succeed at the easiest use case. From there, the team will work towards milestones for the mapping of the environment, path planning the mobile base in simulation and on hardware, localization, and obstacle avoidance. Note that, as a lesson learned from the spring semester, our schedule features an initial integration of perception, manipulation, and mobility at the beginning of October. Even if the mobility subsystem needs to be tele-operated at this point in the semester, having a baseline for integration and front loading the development of the ROS protocols will enable us to develop a more reliable system and understand the unique challenges we can expect to face. Full integration is scheduled a month prior to the FVD during early November to give ample time for end-to-end testing and further system refinement. In terms of personnel, the end-effector team will transition to working with the mobile base, while the rest of the team will focus on refining their respective subsystems.
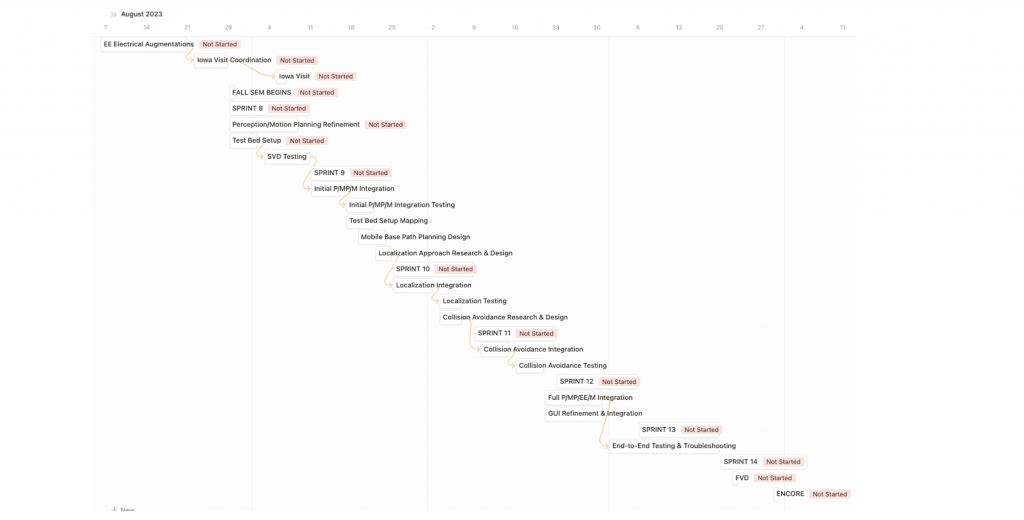
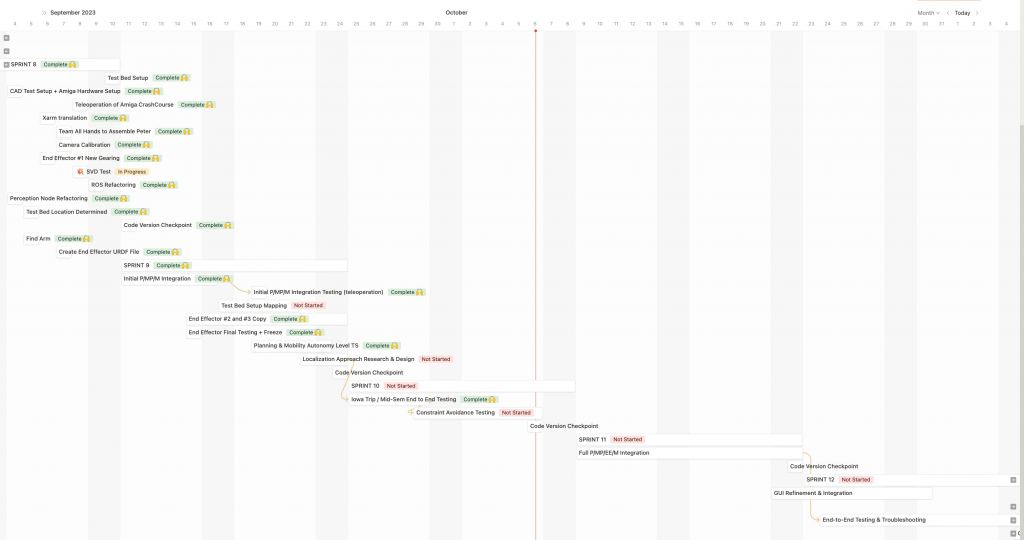
Updated Fall Schedule
Below is an updated schedule for the Fall semester that we continue to iteratively update based on changes in development and plans. We are following a spiral model approach to work towards the FVD. We are also continuing to follow an agile process with the work broken into 2 week chunks to meet our milestones. The major differences in this schedule and the one above are due to restructuring our software architecture to simplify our ROS communication. Additionally, we are using Notion as the tool to track progress and documentation.
Progress Review Presentations
| Presentation Name | Presenter | Date |
|---|---|---|
| Sensors and Motors Lab (PR0) | Alec Trela | 2/8/23 |
| PR1 | Shri Ishwaryaa S V | 2/15/23 |
| PR2 | Sridevi Kaza | 3/1/23 |
| PR3 | Jiyoon Park | 3/22/23 |
| PR4 | Solomon Fenton | 4/5/23 |
| PR7 | Solomon Fenton | 9/13/23 |
| PR8 | Jiyoon Park | 9/21/23 |
| PR9 | Sridevi Kaza | 10/5/23 |
| PR10 | Shri Ishwaryaa S V | 10/26/23 |
| PR11 | Alec Trela | 11/9/23 |