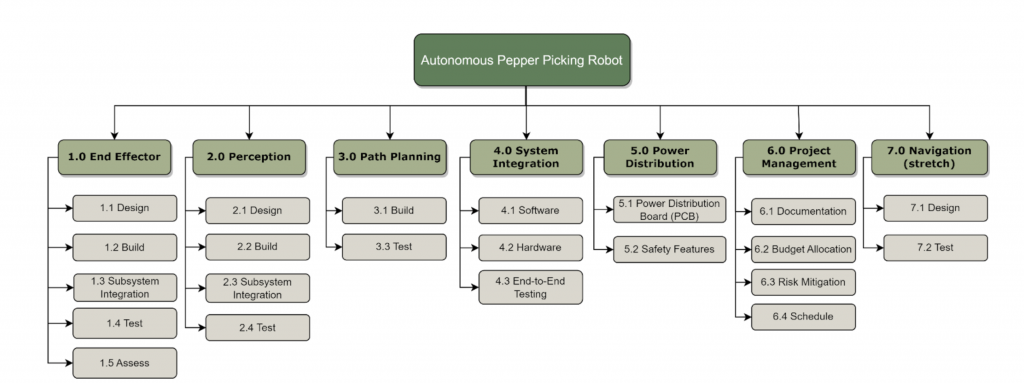
The deliverables of the system were abstracted into a Work Breakdown Structure (WBS), which visually describes the key work packages to be completed while formulating the system. In generating a proper developmental flow of the system, it is crucial to understand the deliverables, the participants, and the timeline. Therefore, the team opted for a product-based WBS, which allows for efficient parallelization of tasks that align with personal competencies and generates products as the output from level-two branches. This structure aligns with developing a system within a condensed timeline and complies with a sponsor request of technical demonstrations throughout the process.
Level-Three WBS
WBS: End-Effector
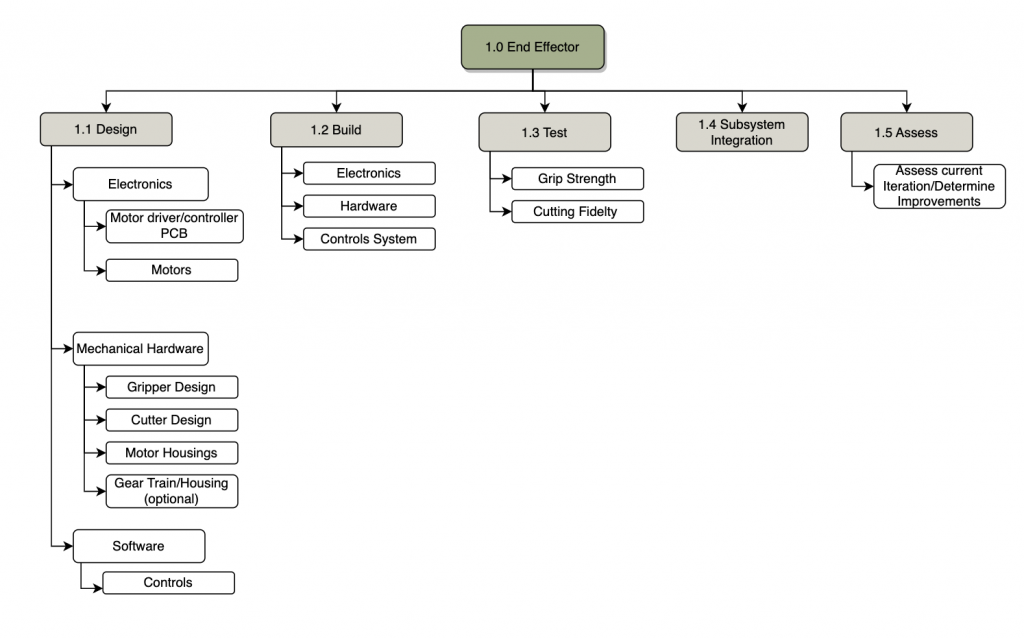
In complying with the sponsor’s request for an application-specific end-effector, a fully customized end-effector was successfully designed, built, tested, and integrated into the overall system.
WBS: Perception
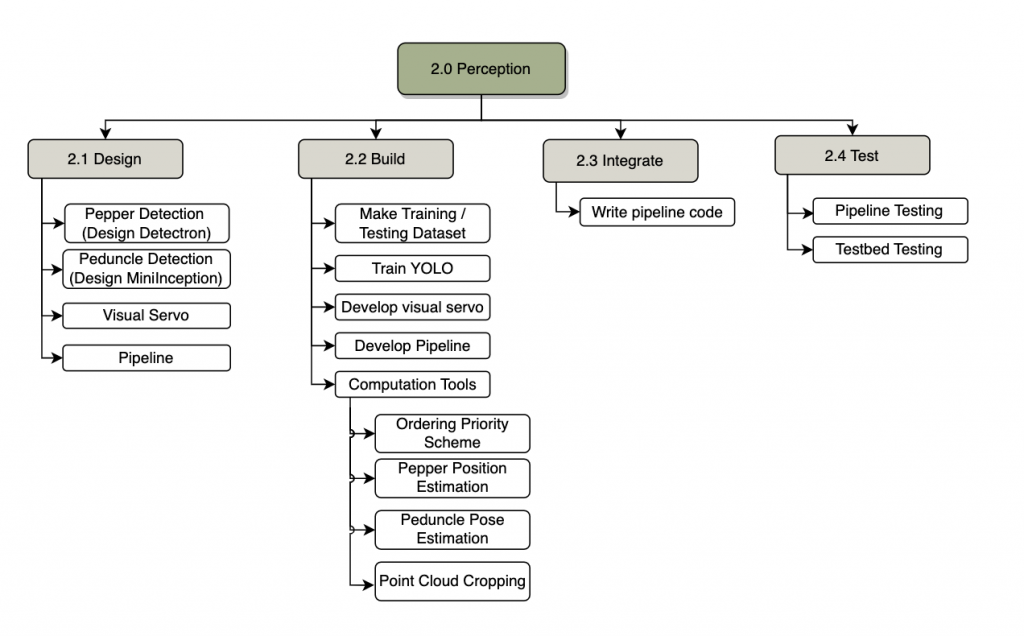
The perception subsystem consists of designing, building, integrating, and testing. Most of the perception work to detect peppers and peduncles was completed in the Spring. The focus of the Fall semester is to redesign the pipeline and incorporate visual servo-ing into the process. We are hoping to increase the robustness and reliability of the perception subsystem during the Fall semester.
WBS: Others
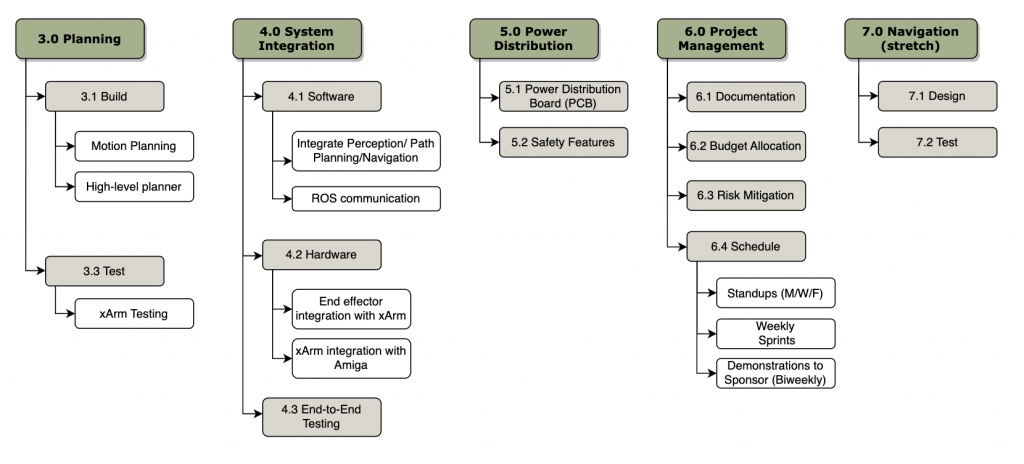
Motion Planning
The development of the motion planning architecture in the Spring semester leveraged the capabilities of MoveIt. To ensure efficacy, this subsystem was first tested in a simulation environment and then implemented in the real-world testbed environment afterwards. The motion planning work from the Spring was integrated with the new xArm. In the Fall semester, the xArm API will be utilized instead of MoveIt.
System Integration
System integration will occur incrementally as we develop. Whenever new features are added at the subsystem level, they will then be integrated into the full system, and end-to-end testing will be completed.
Power Distribution
This work segment has been completed. A custom power distribution PCB has been designed, fabricated, tested, and integrated into the overall system to safely supply 12V and 3A to the dynamixel motors of the end effector with a e-stop mechanism.
Project Management
The general oversight of project activities is reflected in the project management branch, which oversees major pillars of project management: work, budget, risk, and schedule. In ensuring that the project milestones are met, the team has instituted a robust communication pathway. This process consists of stand-up meetings and technical demonstrations to avoid risks associated with communication.
Navigation
In an attempt to make the system fully autonomous, we will introduce a mobile platform to allow the robot to navigate to plants that need harvesting. This will add two DOFs to our robotic system that will expand our manipulator’s reachability map as well as compensate for the speed and acceleration limits of the arm. The mobile base subsystem will include the design, integration, and testing of integration with the Amiga. As a stretch goal, the team may aim for the mobile base to work synchronously with the manipulator robot to reach its maximum performance capabilities. The current plan is to control the Amiga base through teleoperation.