Our primary tool for managing our schedule and documenting our work is Notion. We have added semi-custom templates for our meetings, tasks and sub-tasks, resources, work logs and issue-risk logs.
Schedule of PRs
| Progress Review | Presenter | Presentation |
| 1 | Ishir Roongta | PR #1 |
| 2 | Sai Gangadhar Nageswar | PR #2 |
| 3 | Jaskaran Singh Sodhi | PR #3 |
| 4 | Shashwat Chawla | PR #4 |
| 5 (SVD) | Kavin Kailash Ravie | PR #5 |
| 6 (Encore) | All | PR #6 |
| 7 | Shashwat Chawla | PR #7 |
| 8 | Sai Gangadhar Nageswar | PR #8 |
| 9 | Jaskaran Singh Sodhi | PR #9 |
| 10 | Kavin Kailash Ravie | PR #10 |
| 11 | Ishir Roongta | PR #11 |
| 12 (FVD) | All | FVD |
| 13 (Encore) | All | FVD Encore |
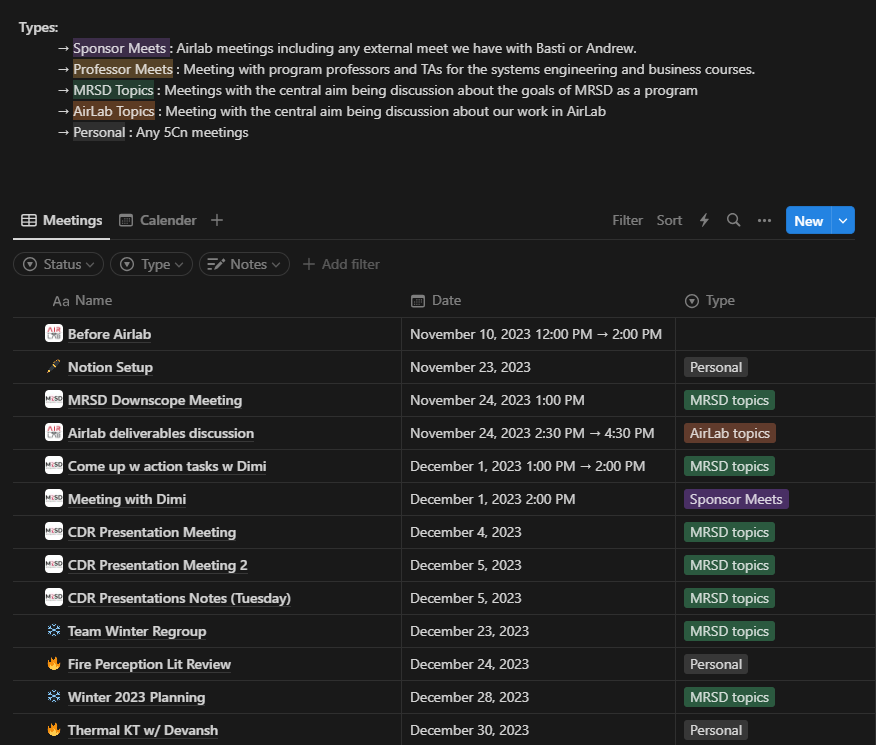
Schedule of Meetings
Our meetings are scheduled in Notion for jotting down agendas, efficient note taking, and creating action tasks. Our meetings are also tagged with roles for business, logistics and technical meetings.
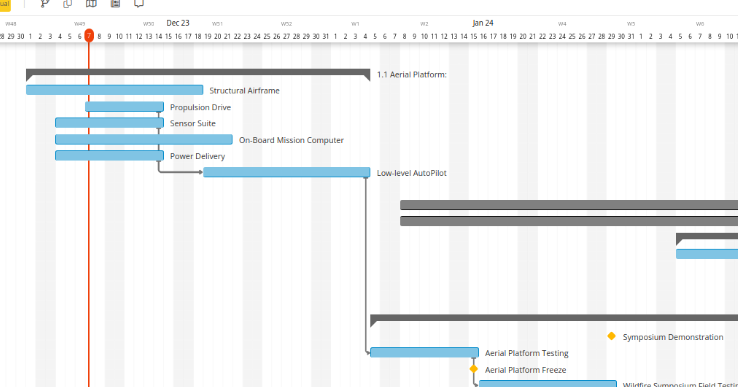
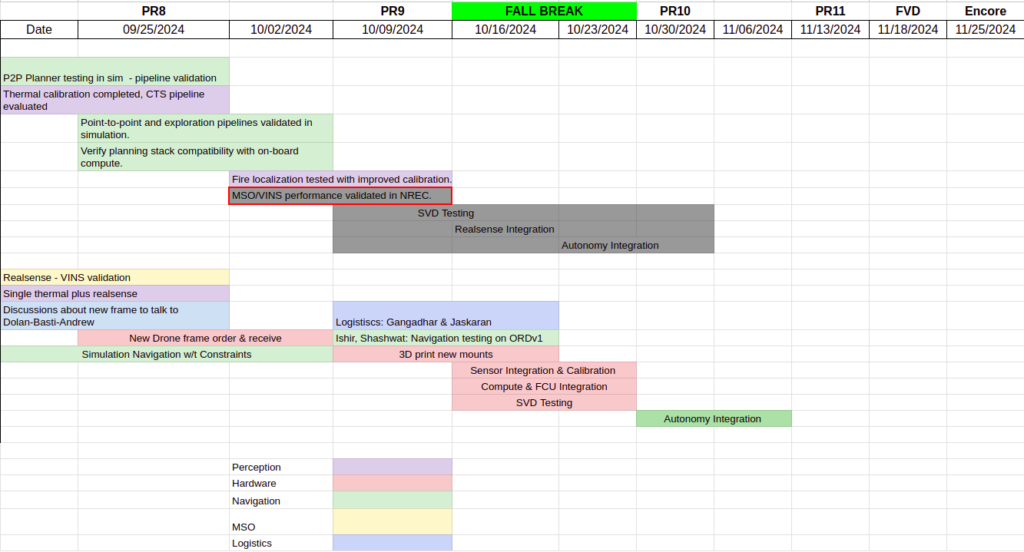
Gantt Chart
Our Gantt chart is closely followed by keeping a task list in our Notion teamspace.
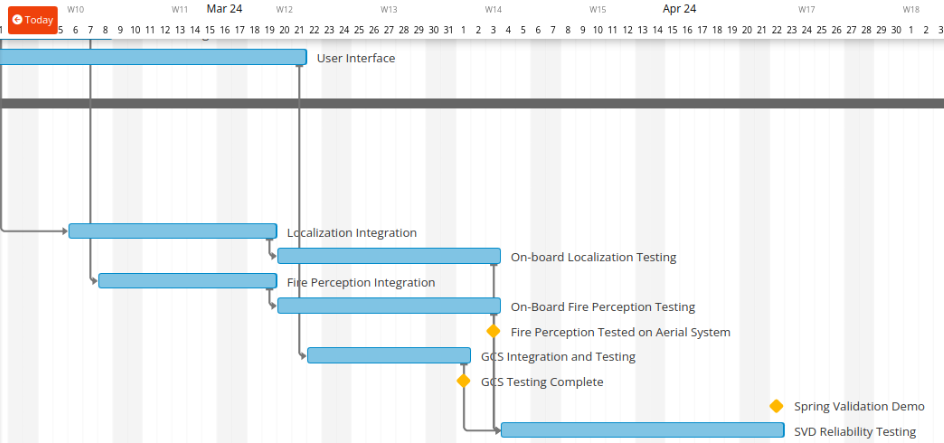
Till Spring Demonstration:
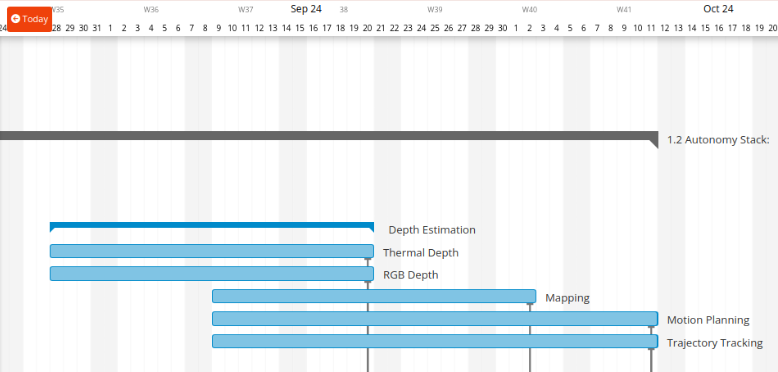
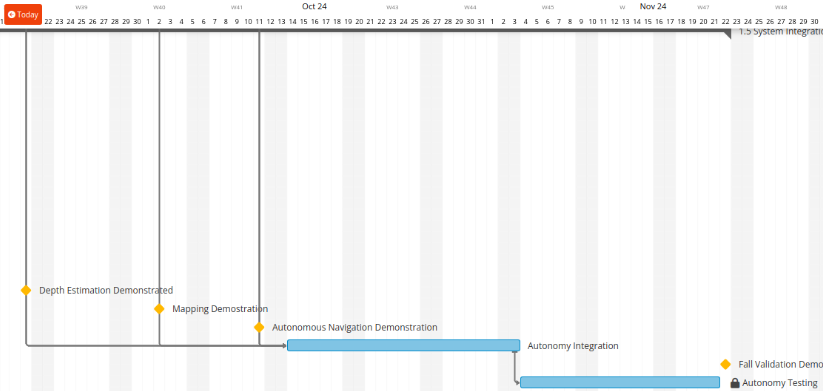
Till Fall Demonstration:
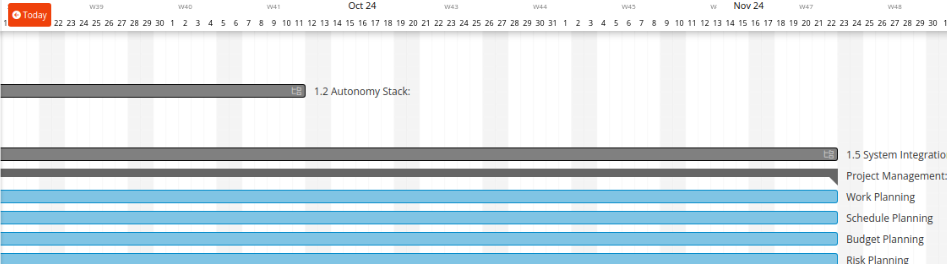
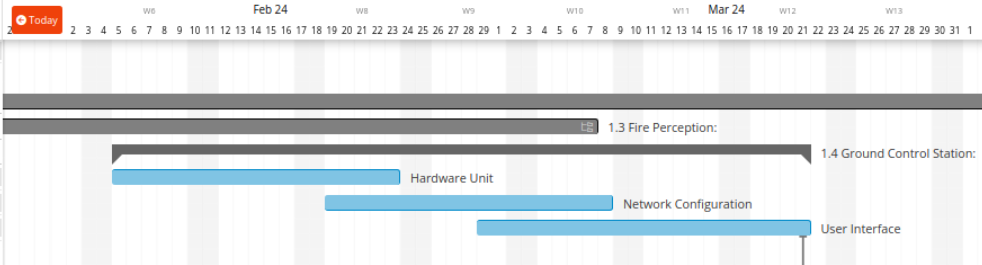
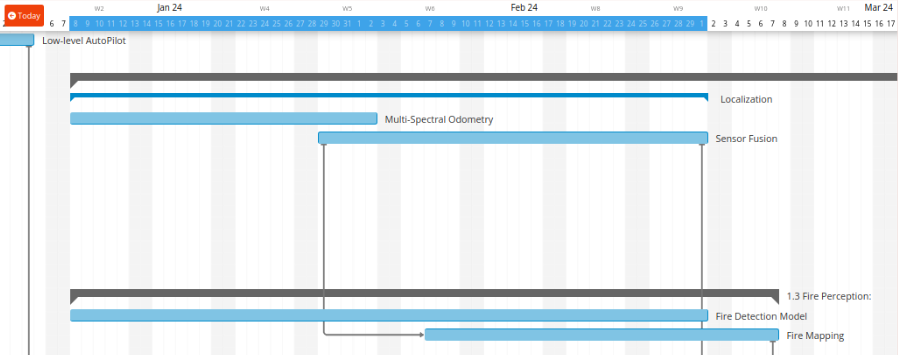
Subsystems Timeline – FVD
Spring Test Plan
Fall Test Plan
Issue Logs
The issue logs page is managed as a notion page with brief summaries about the issue, steps to reproduce them and steps taken to resolve it. Please visit the logs here:
Risk Management
The risk logs page is managed as a notion page with brief summaries, likelihood, consequence, and mitigation plan to be taken/already taken for the risk.
Notable risks that occurred:
Unavailability of Testing Space: At this point we’re nomads searching for lands to set fire. Our priority for the spring semester was to have a testing space with open field (making it safe to fly the drone), power supply (to power 3-4 heaters simulating fire hotspots), and WiFi to setup a ground station. We first converged on Hawkins which even had smoke bomb permission. When that didn’t work out due to some changes in city administration, we explored Nardo and Gascola. While Gascola had smoke permission, the environment was much more structured at Nardo when it came to ease of setup and logistics, and hence we did our SVD at Nardo. Moving forward we are again searching for a location (preferably indoors) where we can demonstrate the system working in smoke.
Hardware Failure: Our first crash happened between PR3 and PR4 where an indoor flight test resulted in the drone dropping from about 1.5m due to unexpected sag in the battery. The antenna mount broke, the battery mount was off, and landing gears destroyed. However due to our prior mitigation of this risk, we were able to perform a full repair in one night. The sturdiness of our system was also tested and we concluded that after 7-8 crashes at Nardo, the drone design was solid.
The following is the consequence and likelihood matrix made for these risks.