Phoenix Pro – Fall Semester
New Design.
Focused Sensor Suite
With a single FLIR Boson 640 camera and Intel Realsense D456
Phoenix Pro. Seeks. Fire

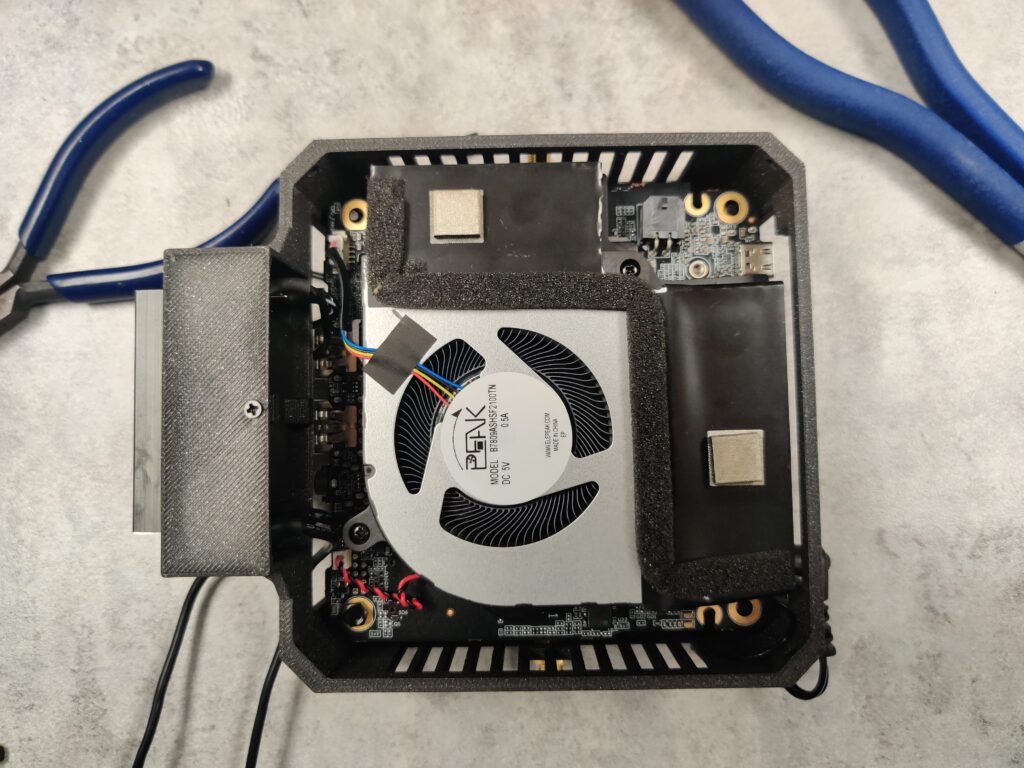
Powered by
Intel NUC Pro.
Handling our integrated autonomy and fire detection module making Phoenix Pro fully Autonomous.
Simplified Camera Config
Reduced sensor suite to single RGBD and Thermal camera, making Phoenix More Accurate on Localizing Fires.


Rugged build.
A carbon fiber frame, with 3D printed cages for essential components. Phoenix Pro has survived 13 crashes.
ORDv1 – Spring Semester
Bold Design.
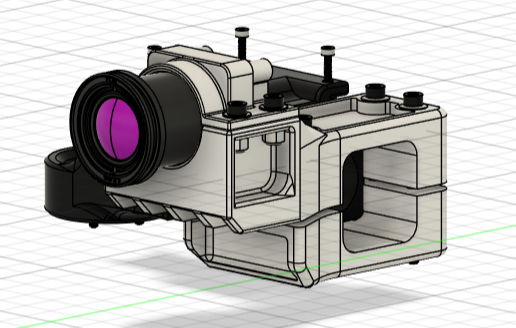
Extravagant Sensor Suite.
With 6 RGB fisheye, and 2 Flir thermal cameras, Phoenix. Sees. Everything.
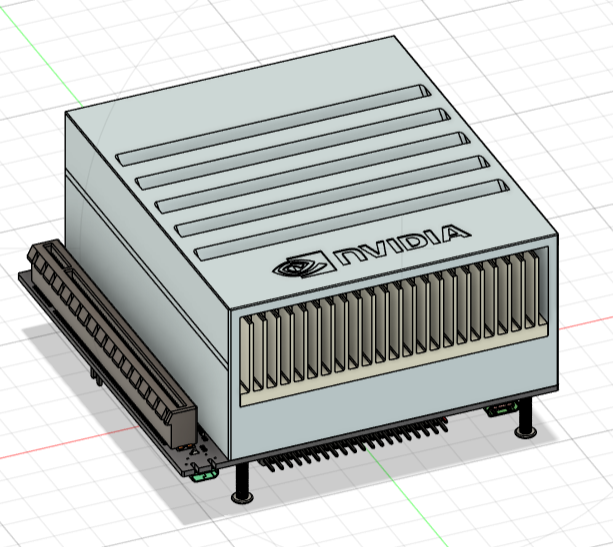
Powered by Nvidia AGX Orin.
Seamlessly running our autonomy stack making Phoenix More Intelligent.
Capable of Thermal Vision
Performs in Smoke, low Visibility conditions, making Phoenix More Resilient.
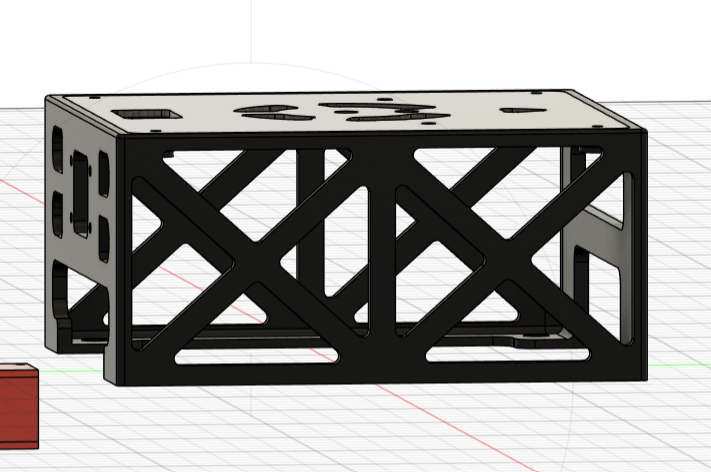
Protected by 3D printed cages.
A carbon fiber frame, with cage protection of on-board compute, making Phoenix More Rugged.
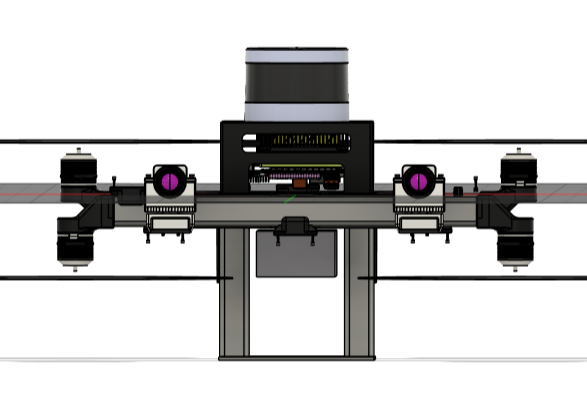
Implementation Details
The aerial hardware platform includes the following components:
- Base-frame
- 4 x (motors)
- 4 x (propellers)
- 6 x RGB Fisheye Cameras (specific)
- 2 x Thermal Cameras (specific)
- Nvidia AGX Orin
- Voltage Regulator
- 6 x RGB Camera mounts
- 2 x Thermal Camera mounts
- Time-sync cable
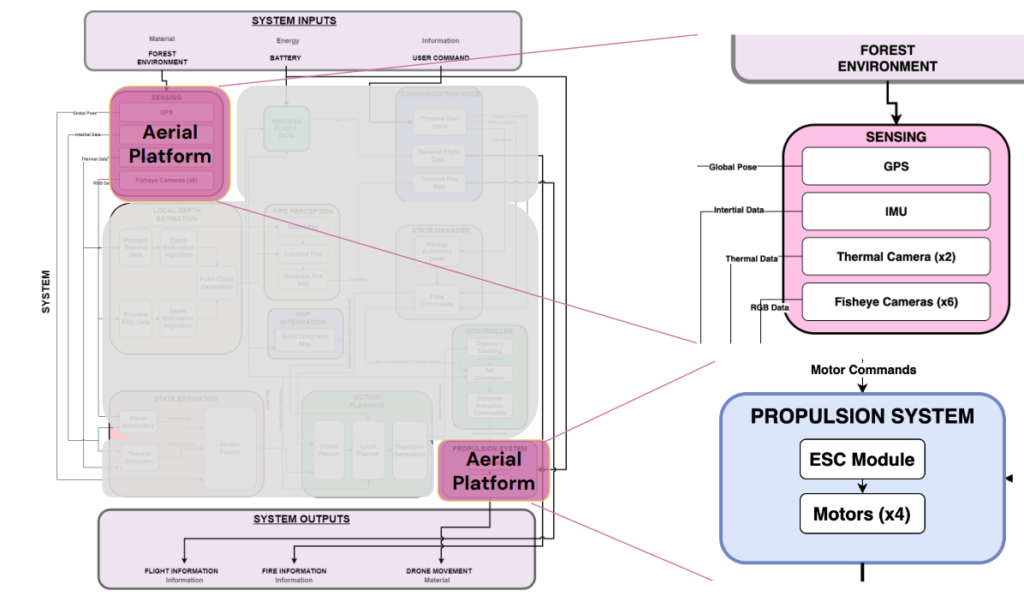
Aerial Platform Overview
Ground Control Station
A GCS would display meaningful map of the route taken by the drone. The map would contain information about the path taken (from odometry), and the fire hotspots with markers including the intensity of the fire.
Parts for the GCS have been ordered and shown in the Budget-Part List page.
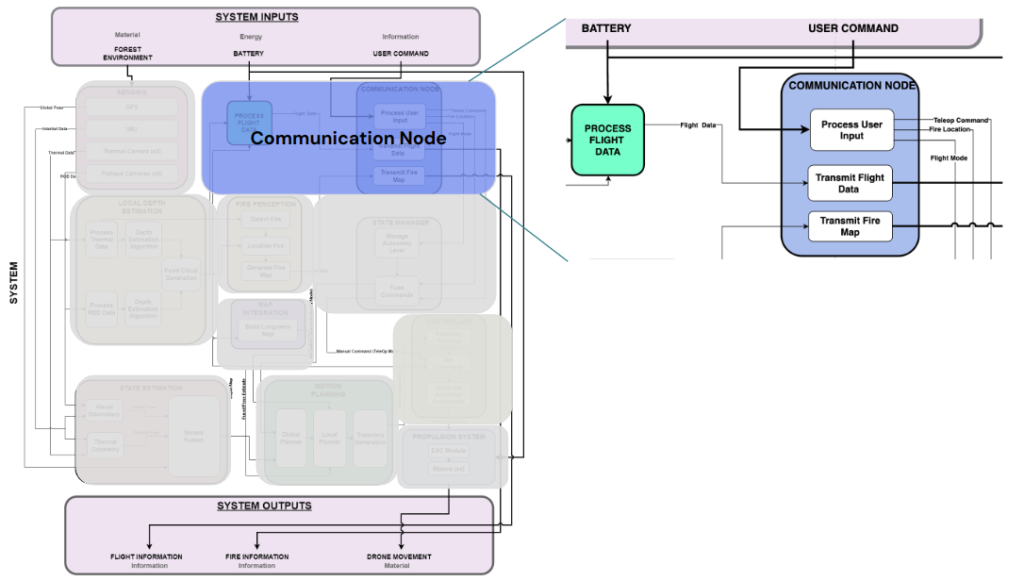
Orin-FCU Communication
Robust and reliable communications between the companion Mission Computer and the FCU is paramount for augmenting advanced functionality like vision-based state estimation, Autonomy etc.
This communication is achieved through a UART link between the two, with MAVLINK as the data transport protocol. MAVROS handles the ROS-MAVLINK conversions for us. On the PX4-side the mavlink_receiver module parses the incoming MAVLINK stream and publishes appropriate uORB topics for other modules.
Communications Overview