Our Drone Platform

Hardware Platform:
- Base Platform: DJI M100 Matrice Frame
- Computing: Nvidia Jetson Orin-NX
- Sensors:
- Gremsy G-Hadron Gimbal (Excluding Herelink)
- GPS Compass
- RealSense D435
- FLIR Hadron 640R
- Communication: Doodle Labs Smart Radio Model RM915
- Control: Cubepilot Pixhawk 4 FCU
- Custom Modifications: Extension legs, Props Shield, Gimbal Mount, NVDIA Orin and Doodle Labs Radio Mount, RealSense and Radio Antenna Mount
- Joystick
Software Stack:
- Core System: ROS2 Network Architecture
- Flight Control: MAVROS for PX4-Orin-GCS communication
- Development Environment: Docker built for Jetson (L4T) platform
- Ground Control: QGroundControl
Mechanical Modifications:
- Gimbal Mount
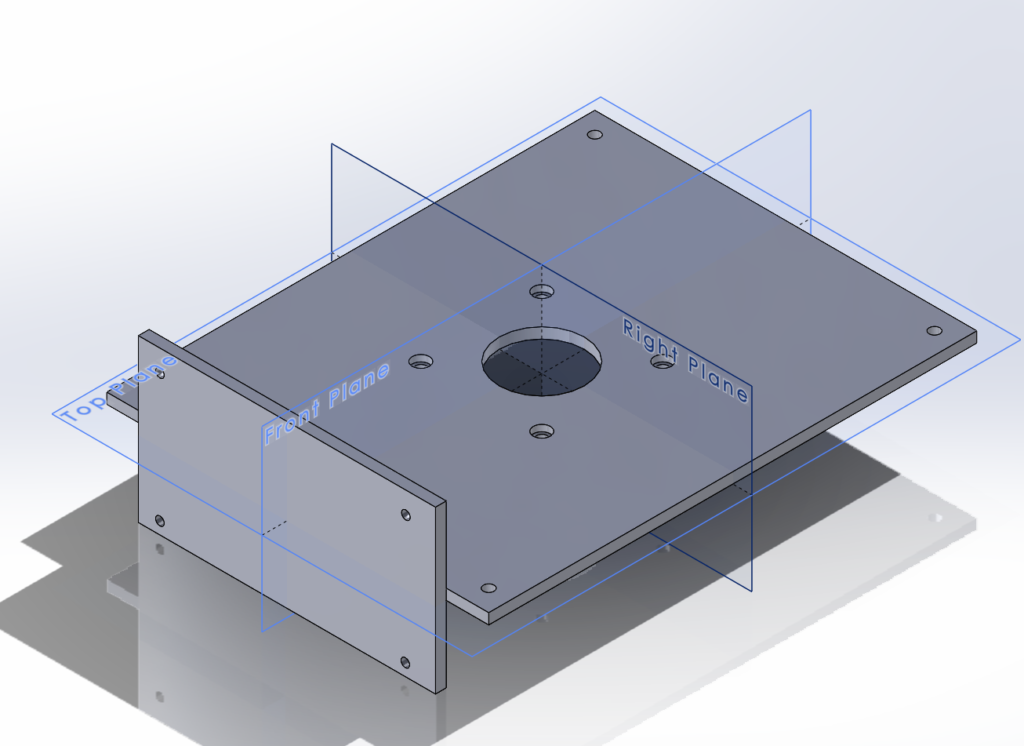
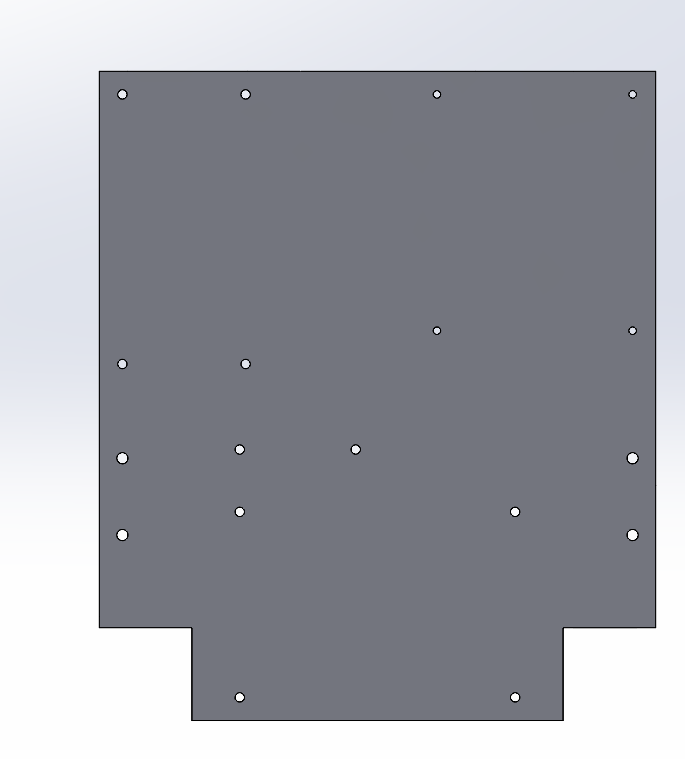
- NVDIA Orin and Doodle Labs Radio Mount
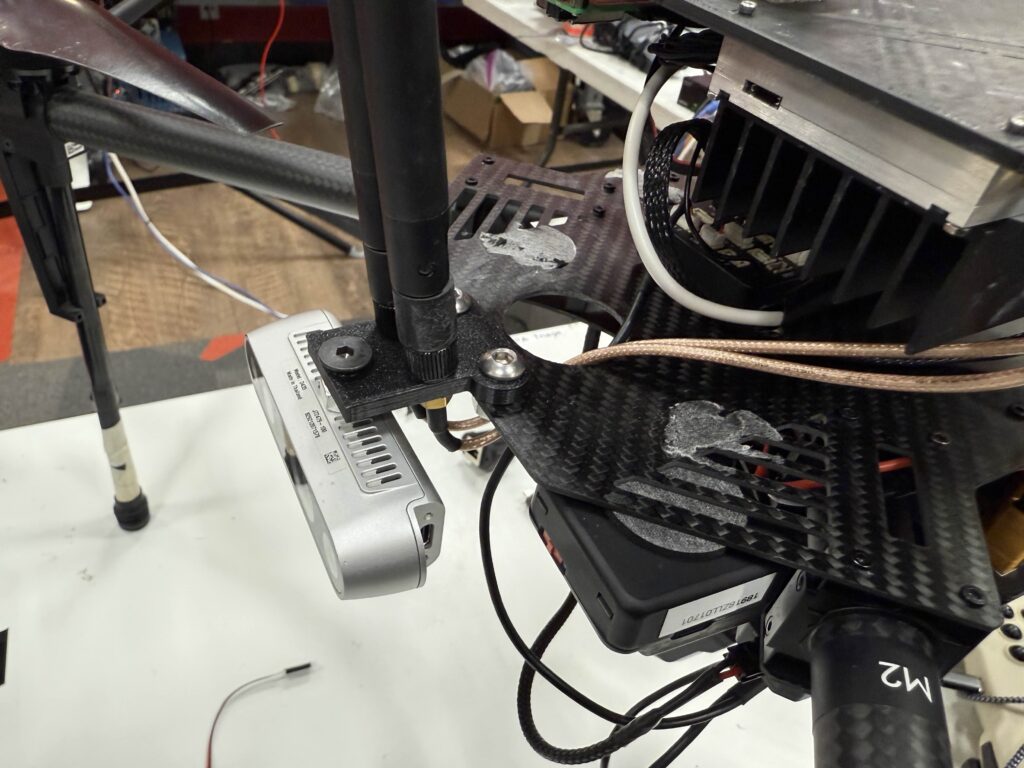
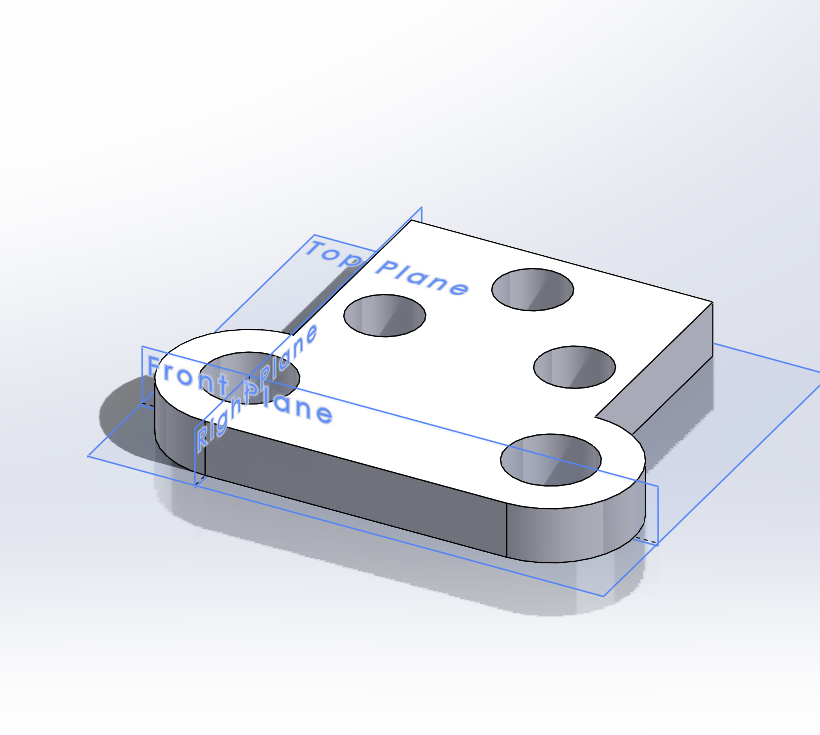
- RealSense and Radio Antenna Mount
- Extension Legs
- Propeller Shield