You need to add a widget, row, or prebuilt layout before you’ll see anything here. 🙂
Drone Platform

Hardware Platform:
- Base Platform: DJI M100 Matrice Frame
- Computing: Nvidia Jetson Orin-NX
- Sensors:
- Gremsy G-Hadron Gimbal (Excluding Herelink)
- GPS Compass
- Holybro Pixhawk PM02 V3 12S Power Module
- FLIR Hadron 640R
- Communication: Rajant DX2 Radio with the DX2 24V PoE and RFD900x-us Radio
- Control: Cubepilot Pixhawk 4 FCU
- Custom Modifications: Extension legs, Gimbal Mount, NVDIA Orin, Rajant DX2 Radio, and DX2 24V PoE Mount
- Xbox and Duplex Jeti Joystick
- Remote ID: Z-RID Lite Remote ID Broadcast Module, Black
- Removed Components:
- RealSense D435: No longer needed (reduce weight)
- Doddle Labs Radio: Poor performance (replaced)
- Propeller Shield: No longer needed (reduce weight)
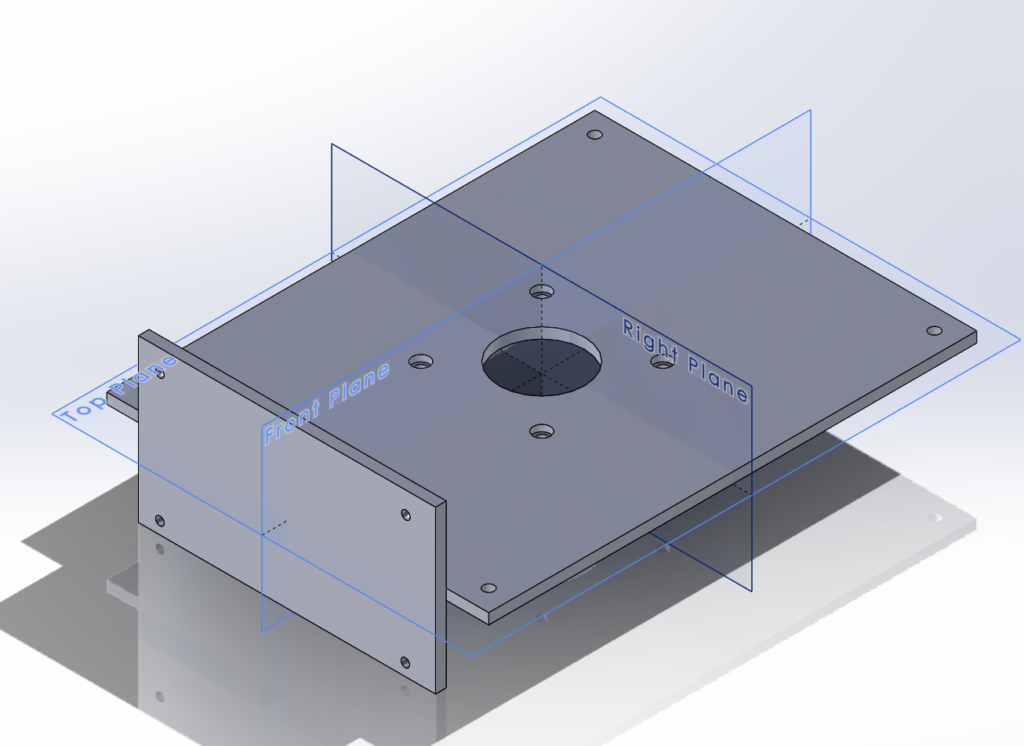
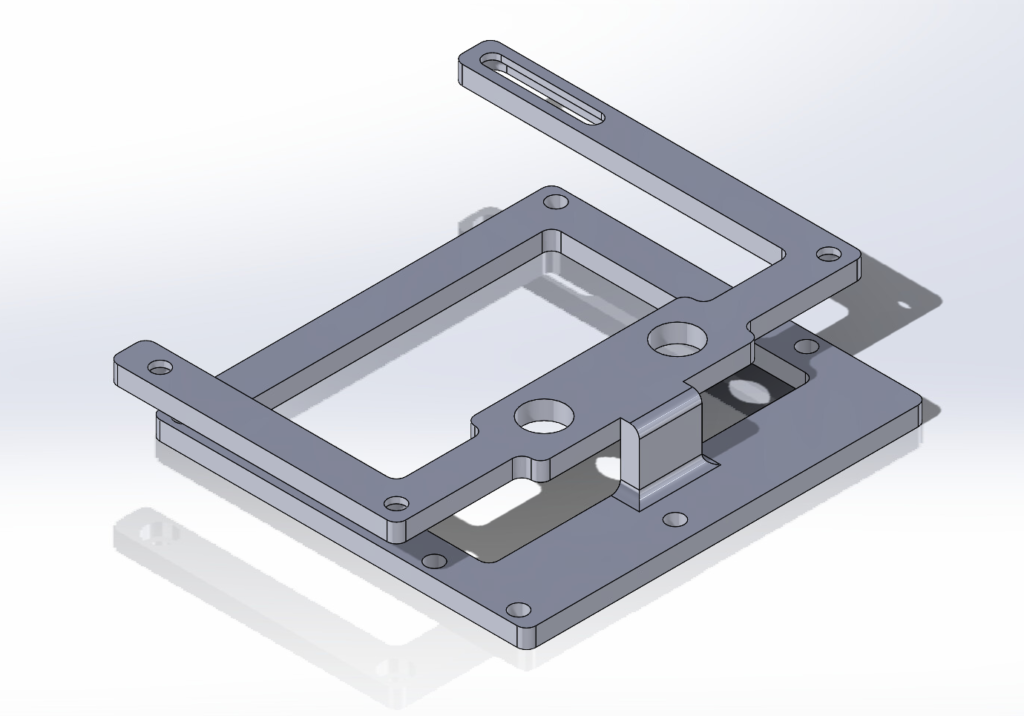
Additional Mechanical Modifications:
NVDIA Orin, Rajant DX2 Radio, and DX2 24V PoE Mount:
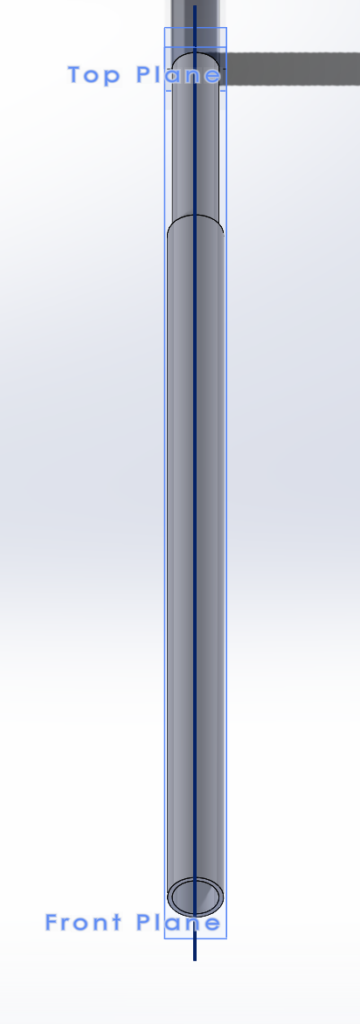
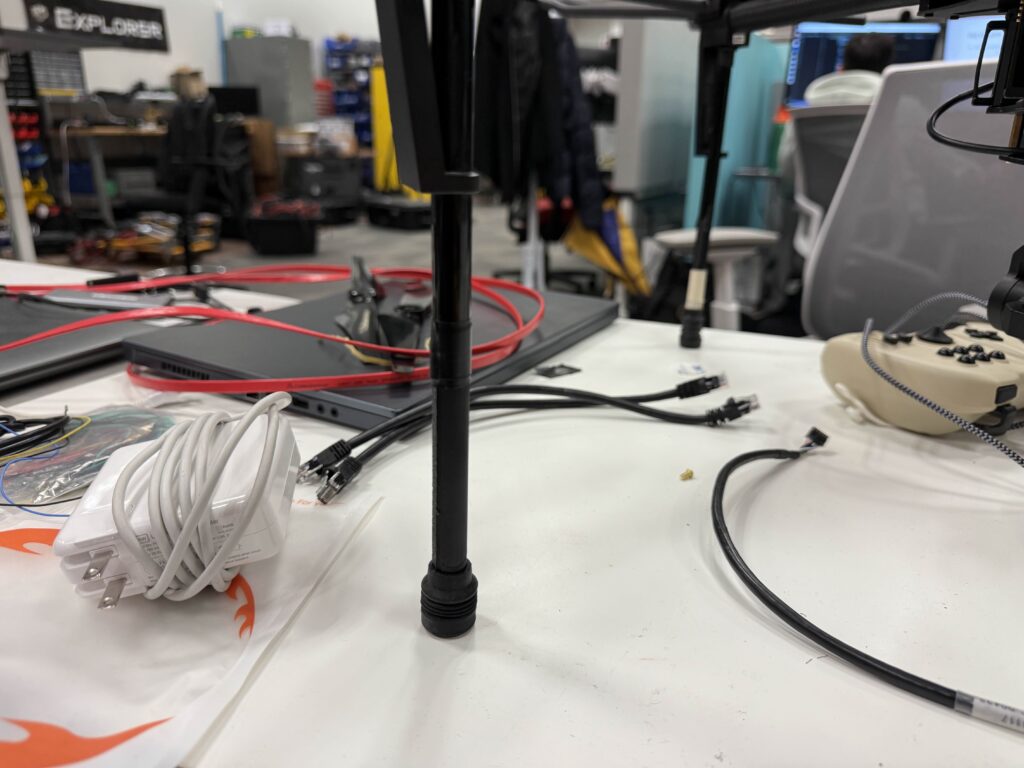
Previous Mechanical Modifications:
Extension Legs:
Gimbal Mount: