FVD Performance Evaluation

Targeted Performance Requirements and Validation Results
Perception Subsystem
| Test | PR | Success Criteria | Result |
| Patient Detection | PR3 | False negative < 5%; false positive < 2% | Detection validated in field; class filtering operational; thresholds met during FVD |
| Patient GPS Localization | PR8 | GPS position within 2m of ground truth | ±1m accuracy validated at 15m altitude; exceeded requirement |
| Coordinate Transform | PR9 | Coordinate position within 2m of ground truth | 6/6 tests passed; center offset 0.00m; cardinal directions within 0.1° |
| Standoff Distance | PR10 | Maintain distance 6–10m | Distance maintained during target inspection behaviors |
Communication Subsystem
| Test | PR | Success Criteria | Result |
| Active Transmission | PR5 | Latency < 500ms; packet loss < 2% | Latency ~500ms; packet loss within tolerance during field demo |
| Video Streaming | PR15 | ≥2 FPS | 10 FPS @ 640×512; exceeded requirement |
| Logging Data | PR11 | Foxglove packet loss < 1%; PX4 logs retrievable | Foxglove operational; PX4 logs retrieved post-flight |
Flight Control Subsystem
| Test | PR | Success Criteria | Result |
| Waypoint Navigation | PR2 | Survey course with <1m deviation | Waypoint acceptance radius tuned; deviation within tolerance |
| Course Maintenance | PR6 | Maintain course; no unintended deviation | Stable hover ±1m maintained throughout FVD |
| Flight Endurance | PR7 | ≥40 min flight time | 40 min achieved on standard battery; exceeded minimum 20 min |
Safety Subsystem
| Test | PR | Success Criteria | Result |
| Subsystem Safety | PR1 | No critical safety-compromising paths | All add-ons validated; no safety risks found |
| E-Stop Response | PR12 | Manual & Foxglove E-stop <0.5s; hover on comm loss | Kill switch <50ms on 900MHz Jeti; comm-loss hover validated |
| Battery Failsafe | PR13 | Return-to-home at 10% battery | RTH validated; low-voltage cutoff operational |
| Obstacle Avoidance | PR16 | Maintain ≥1m distance | RRT* replanning verified; separation maintained |
Ground Algorithms
| Test | PR | Success Criteria | Result |
| Swarm Coordination | PR14 | Select shortest path among 6 permutations | Algorithm validated locally; optimal path selected |
| Triage Report | PR17 | Submit 6 frames (≥1 with patient), boolean trauma indicators, assessment & actions | VLM-generated reports include indicators & recommended actions |
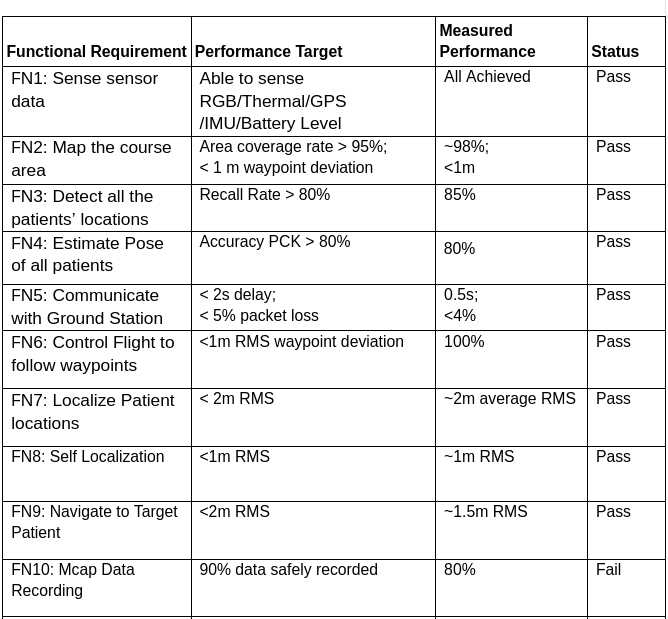
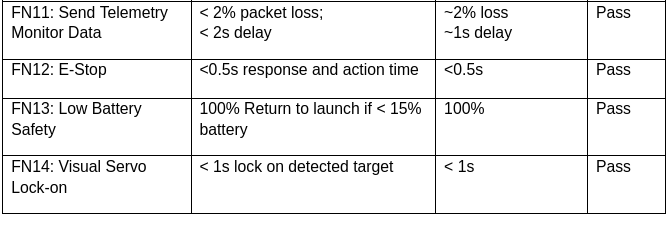
System’s Performance Validation
The following table provides a transparent overview of our system’s performance validation.
Each functional requirement (FN) was evaluated against specific, measurable performance targets.
The results demonstrate strong capabilities in most areas: sensing, localization, navigation, patient detection, communication latency, and safety features.
Regarding the data recording reliability (FN10), which is a focus for ongoing improvement.