Skip to content
The System
System Design
System Implementation
System Performance
System Summary
The Team
Project Management
Media
Documents
Presentations
Software
Design brainstorming
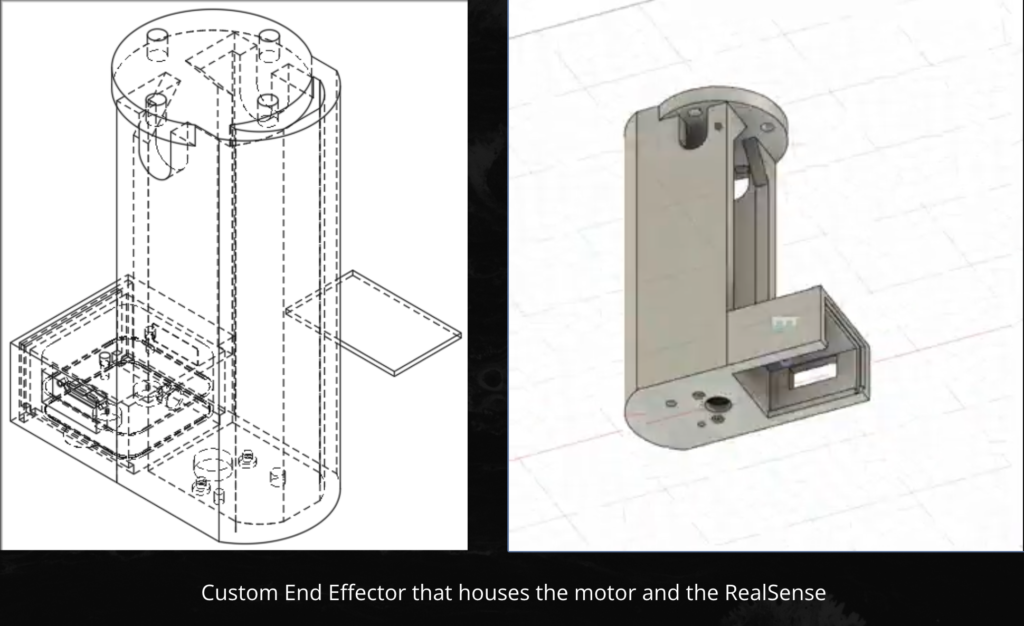
Drawings, schematics, and datasheets End-effector
Component testing & experiment results End-to-end testing
Our Story
Navigation Menu
Navigation Menu
The System
System Design
System Implementation
System Performance
System Summary
The Team
Project Management
Media
Documents
Presentations
Software
Design brainstorming
Drawings, schematics, and datasheets End-effector
Component testing & experiment results End-to-end testing
Our Story
System Implementation
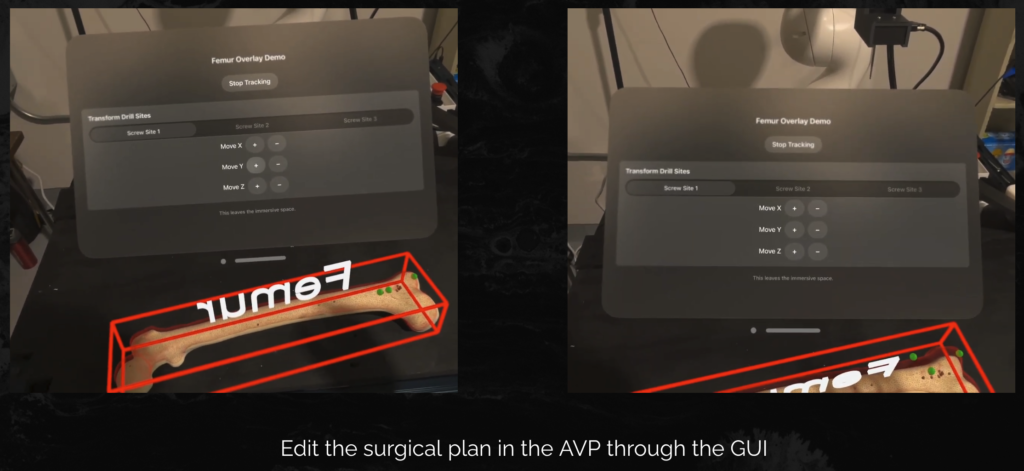
AR Subsystem
Current
Previous
Perception Subsystem
Manipulation
Subsystem
Communciation Subsystem
Hardware