Functional Requirements
The humanoid SHALL…
- Perceive the environment
- Localize in the environment
- Perceive the target goal
- Plan the trajectory
- Balance
- Avoid obstacles
- Perform bipedal locomotion
- Pick and place the targets with loco-manipulation
- Communicate with user
Non-functional Requirements
- Dimensions – Robot and Tote scale: (example – ⅓ of real world)
- Reliable
- Safe
- Robust
- Cost
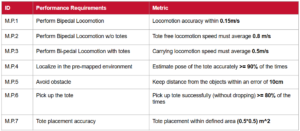
Performance Requirements