Problem Description
Today, first responders typically arrive on scene with little to no information about the environment they have to enter. For example, a firefighter has to consider questions such as, where are the entrances and exits? Where is the fire coming from? Are there any humans still inside and where are they? With human and property damage at stake, first responders have to gather information, analyze the scene, and take action all within a matter of minutes.
The unknown and frequently occluded nature of the environment means that the first responders’ own lives are also at stake. To address the issue of information blindness while protecting the safety of first responders, we seek to develop a robotic platform that can map environments through perceptual degradation, identify points of interest, and rely that information back to first responders. Presenting: SMoRes, Searching while Modeling perceptually degraded environments for time-critical Rescues.
Use Case
An electrician accidentally overloads the power supply at an Amazon warehouse, starting a fire. Due to the size of the warehouse, a sprinkler system has not been installed. The nearest team of firefighters responds to this warehouse fire. As they reach the scene, they ascertain where the closest water pumps are. Unfortunately, when they arrive, all they see are thick plumes of smoke pouring from a large warehouse, and they are unable to determine where the fire started.
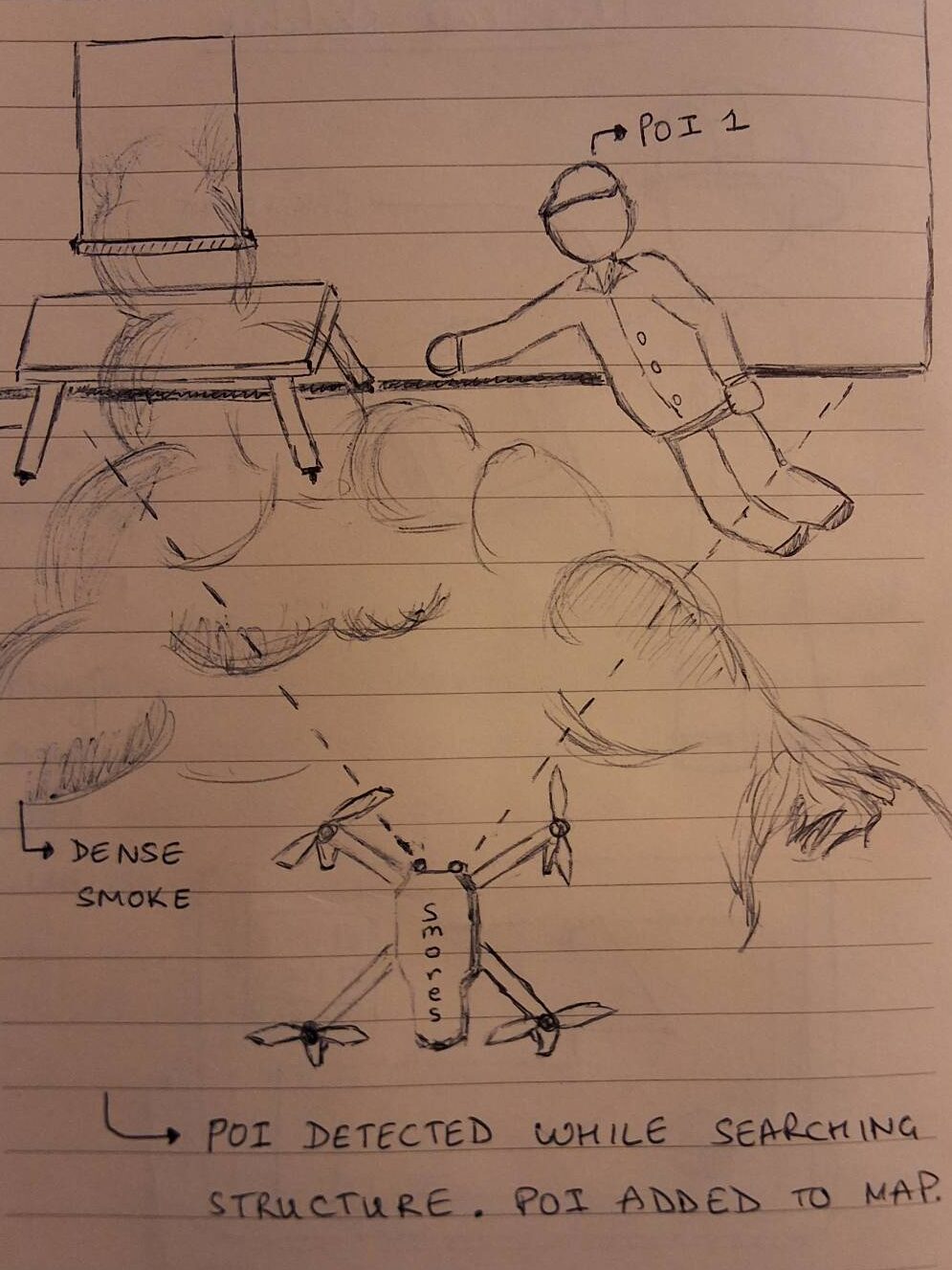
While the firefighters set up to tackle the fire, an operator uses the ground station to deploy a drone to collect key pieces of information: the origin of the fire, any survivors, and open doors that might alter the fire’s flow path. The drone autonomously navigates through the hazardous environment, perceiving through smoke while mapping the warehouse in real-time.
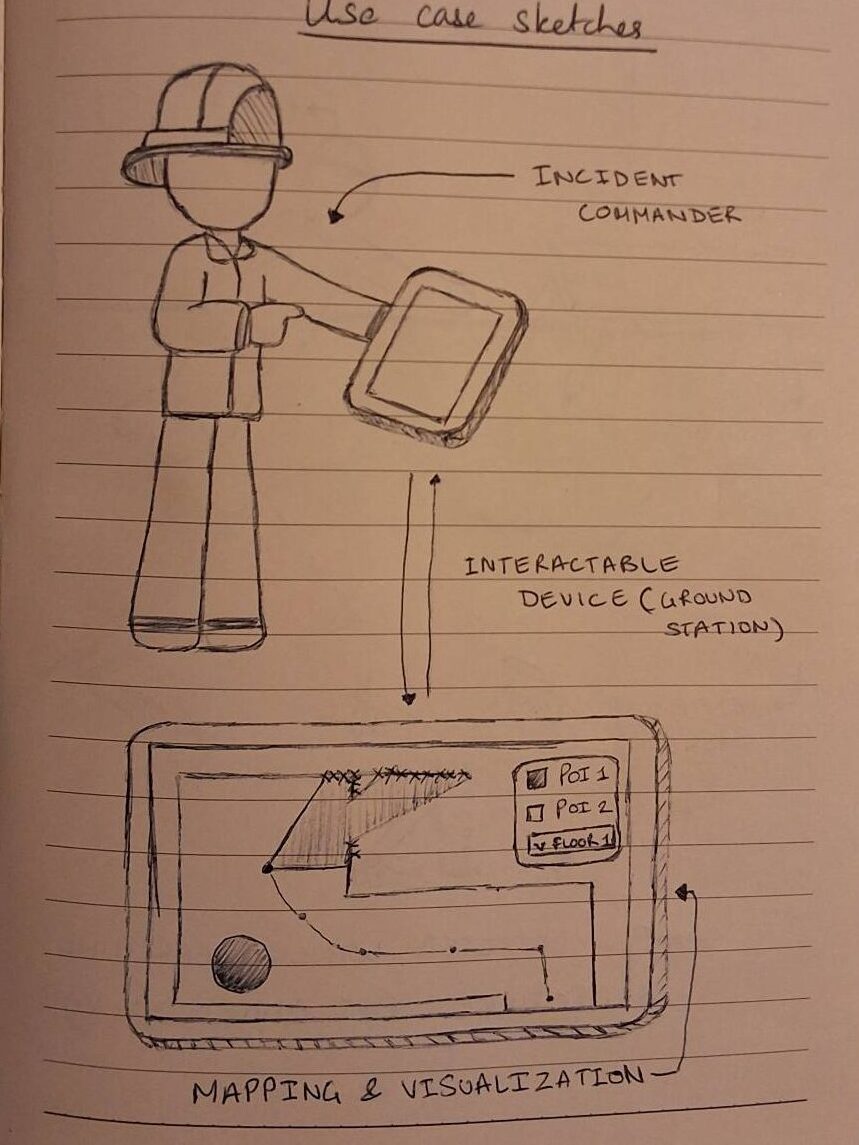
It transmits the maps and sensor feeds to the operator in real-time, allowing firefighters to act based on this information. Occasionally, the operator takes control of the drone to gather more information about noteworthy locations. The operator is able to visualize the locations of humans, open doors, and the estimated origin of the fire for a significant portion of the
warehouse. Armed with relevant information, the incident commander can delegate resources efficiently, directing the indoor firefighting team with pre-planned safe routes and a count of survivors to minimize the damage caused by the fire and maximize the lives saved. The drone returns to the operator once sufficient information about the environment has been captured or the batteries have been depleted. The batteries can now be hot-swapped to be sent in again, or it can fly and relay a bird’s eye view of the fire to aid coordination.