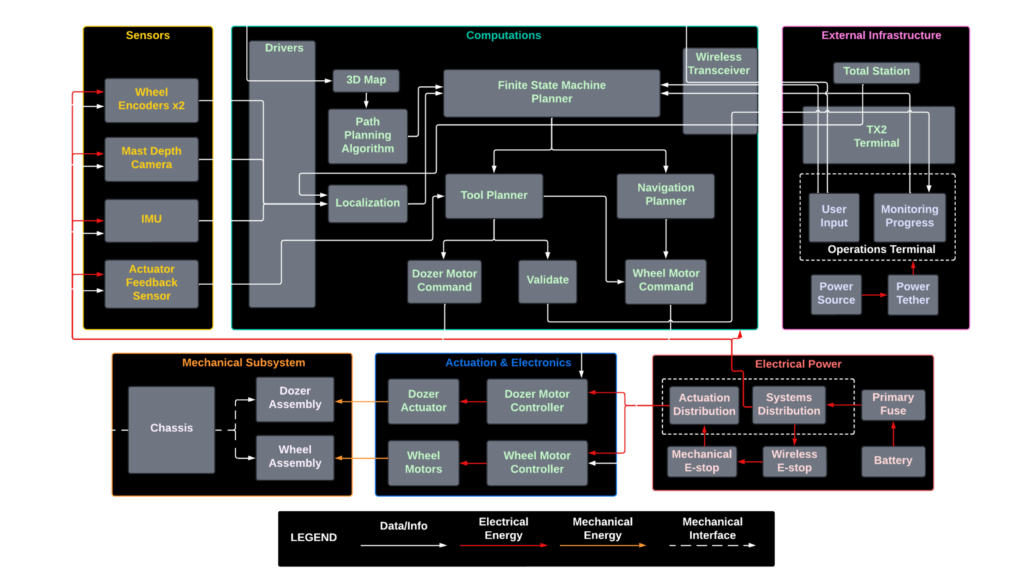
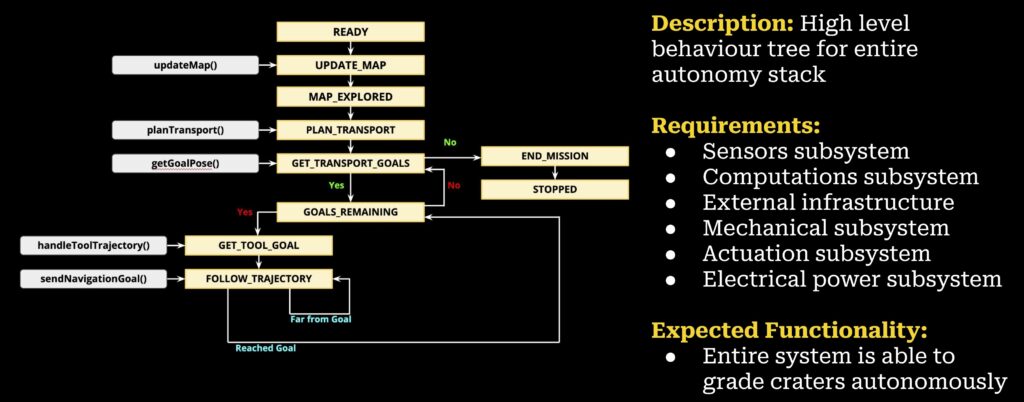
System Architecture
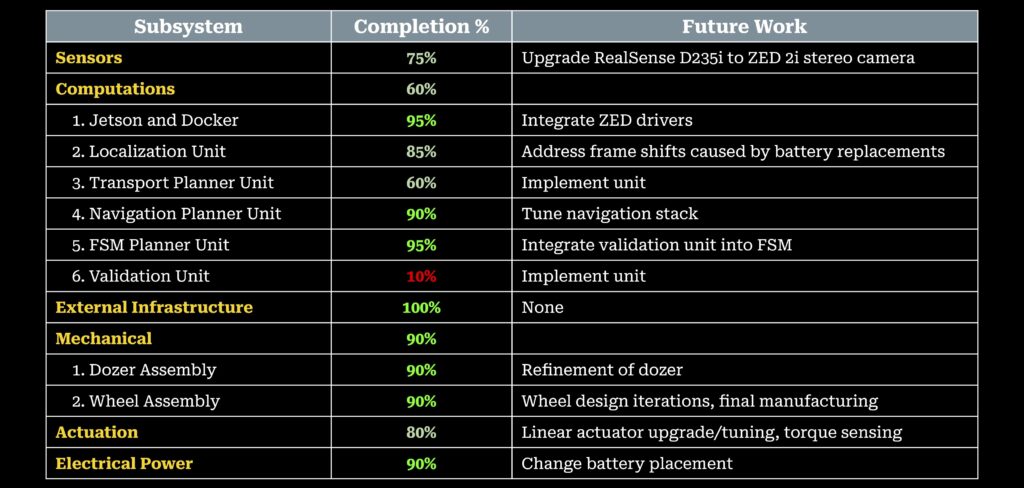
Fall Semester Completion Status

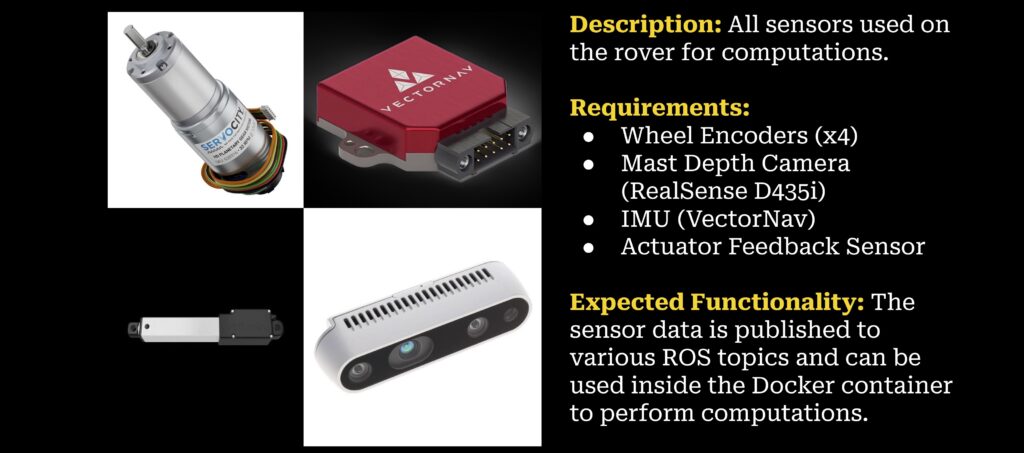
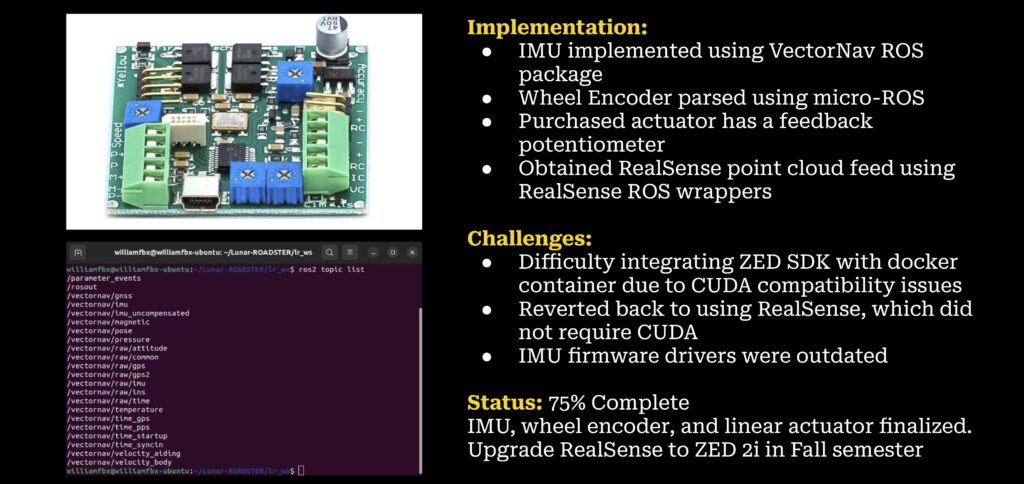
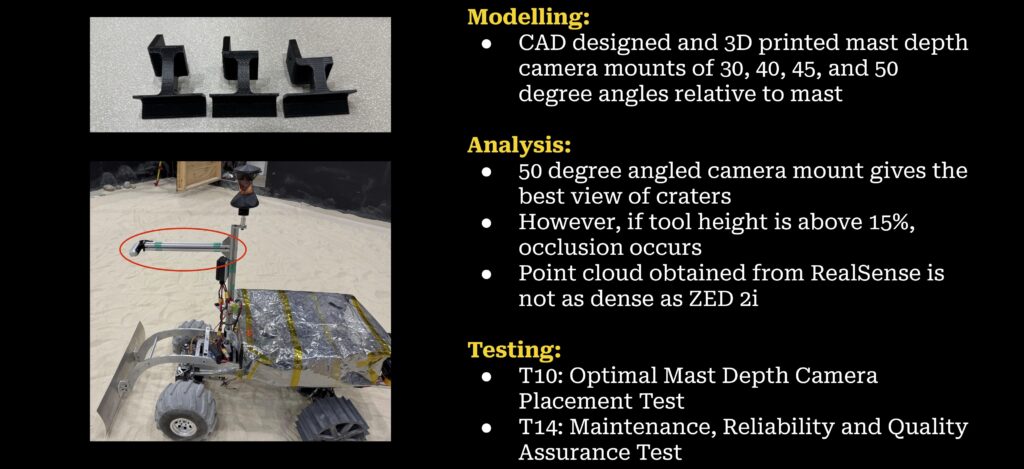
Sensors Subsystem



Computations Subsystem
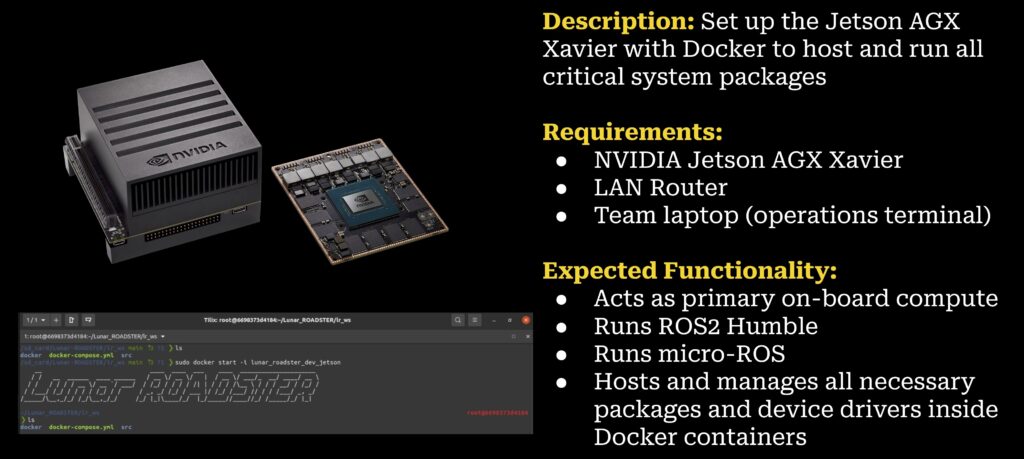
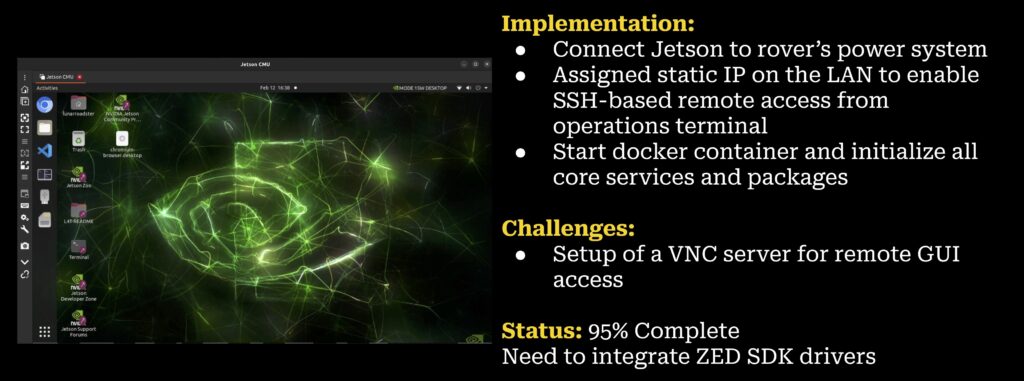
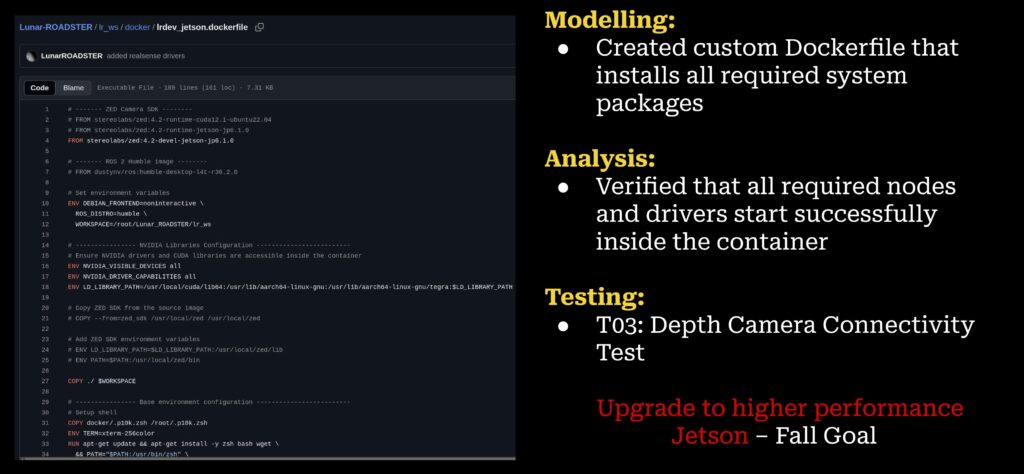
Jetson and Docker



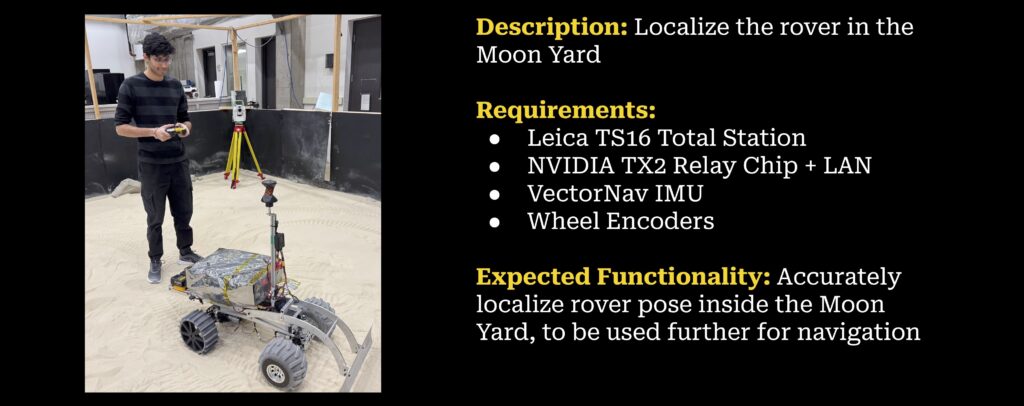
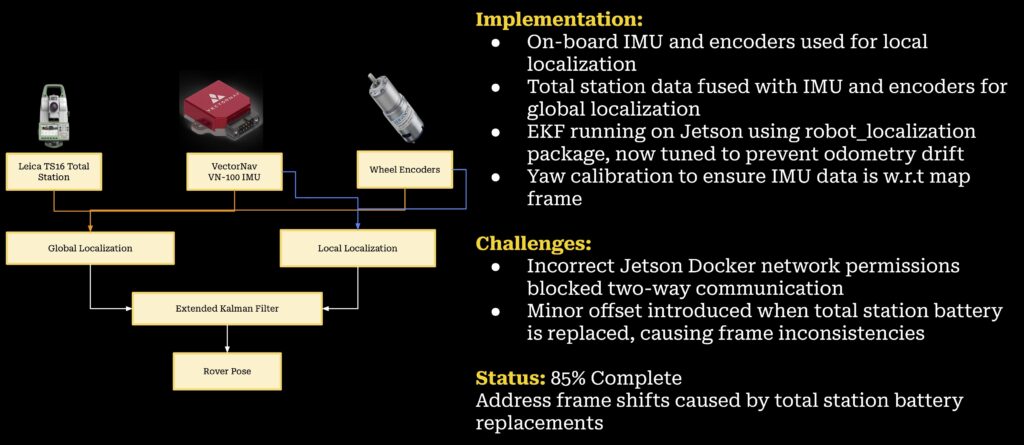
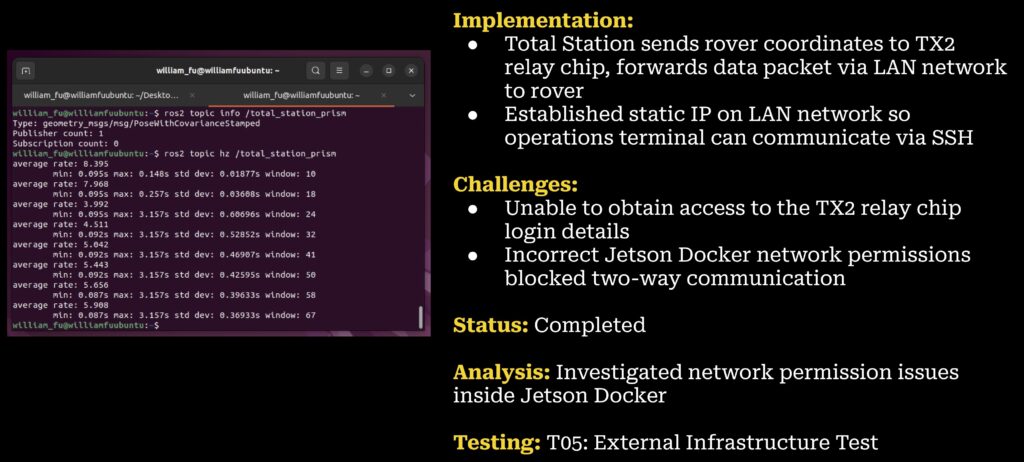
Localization Stack (Total Station)



Localization Stack (Skycam)


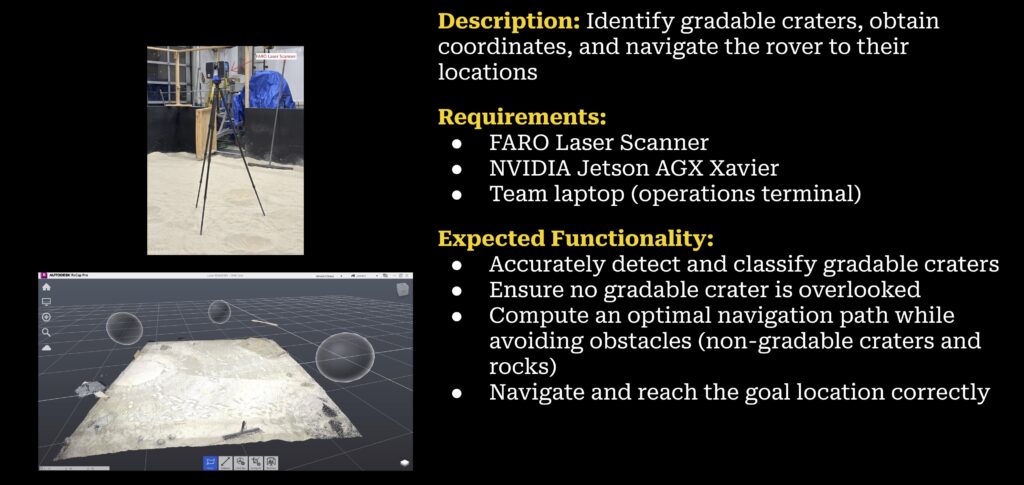
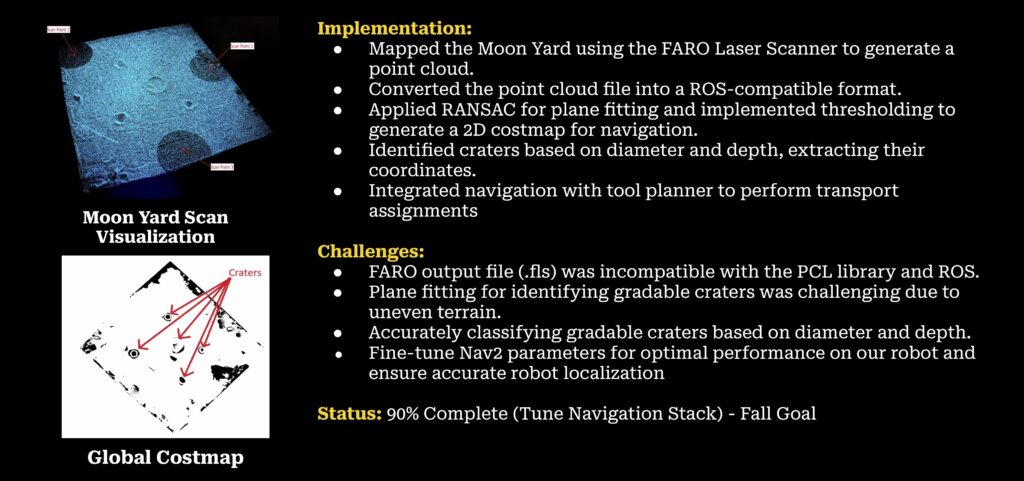
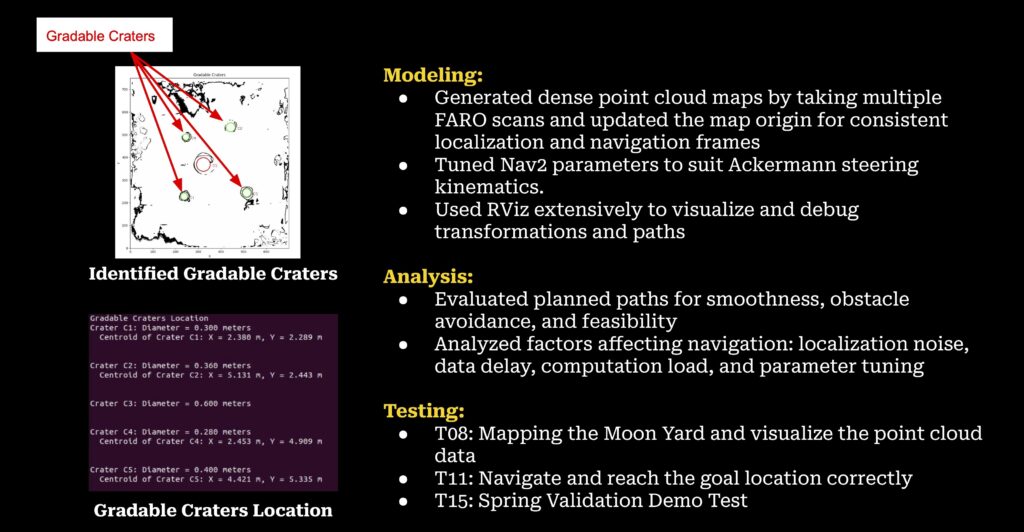
Navigation Stack



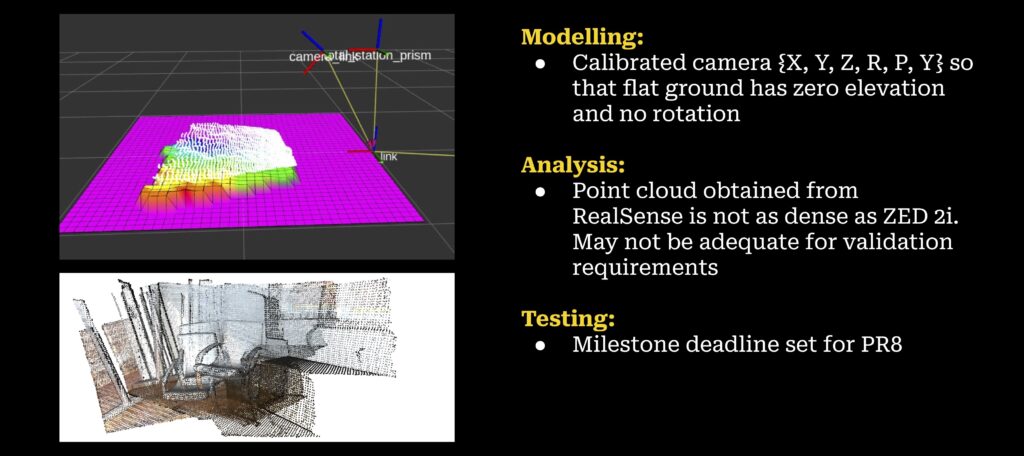
Perception Stack



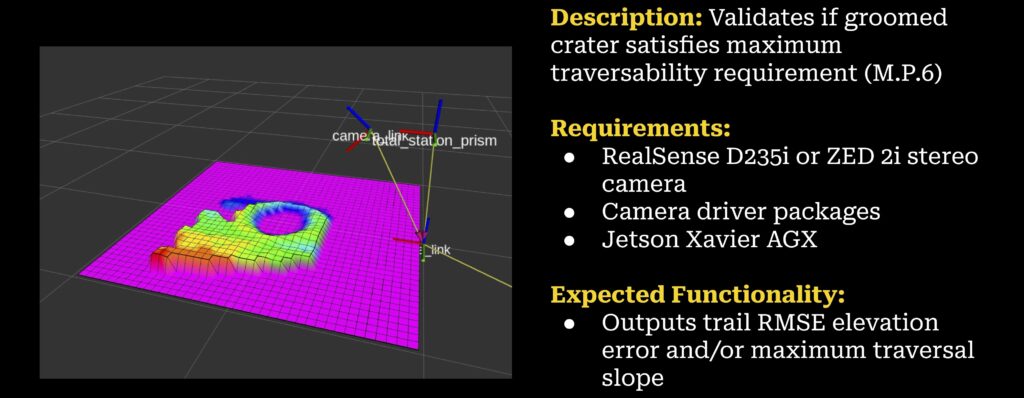
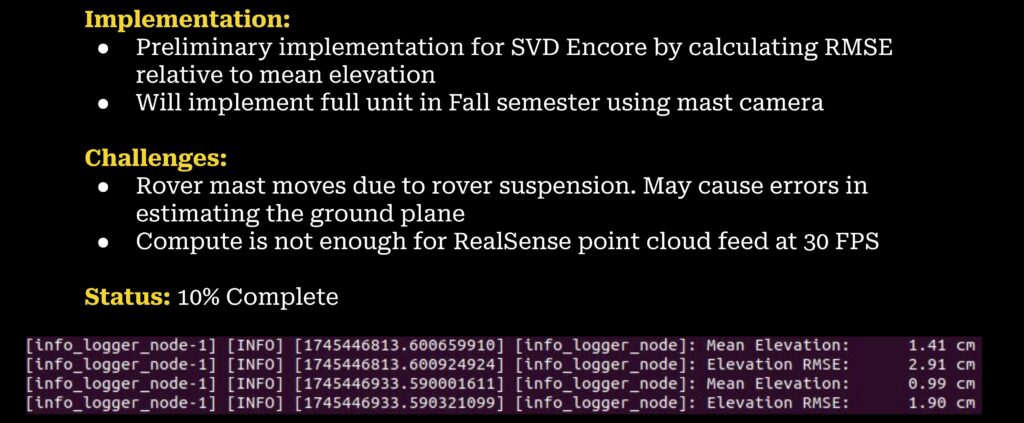
Validation Stack



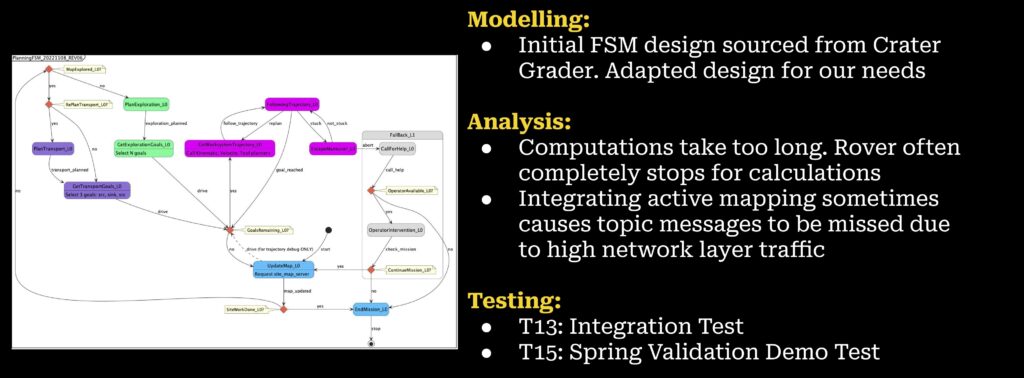
Planning Stack


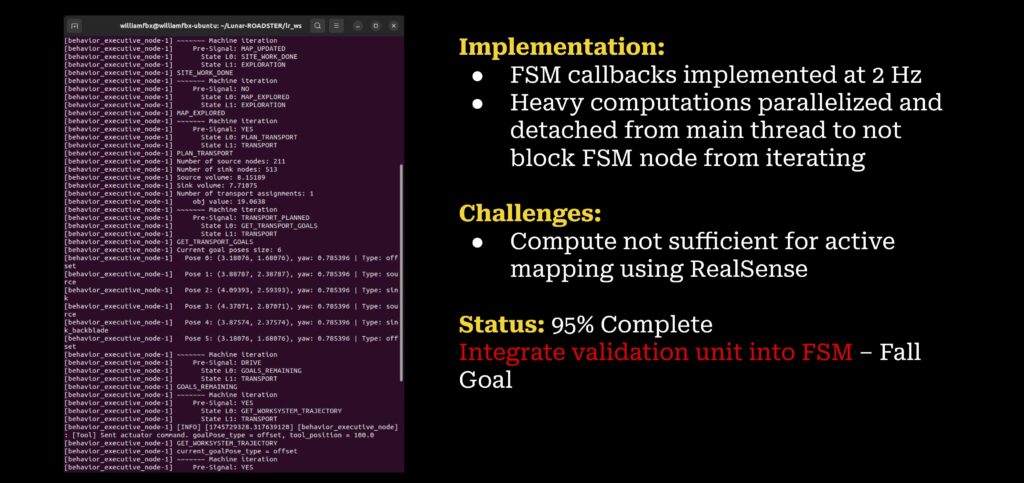
Behavior Executive Node



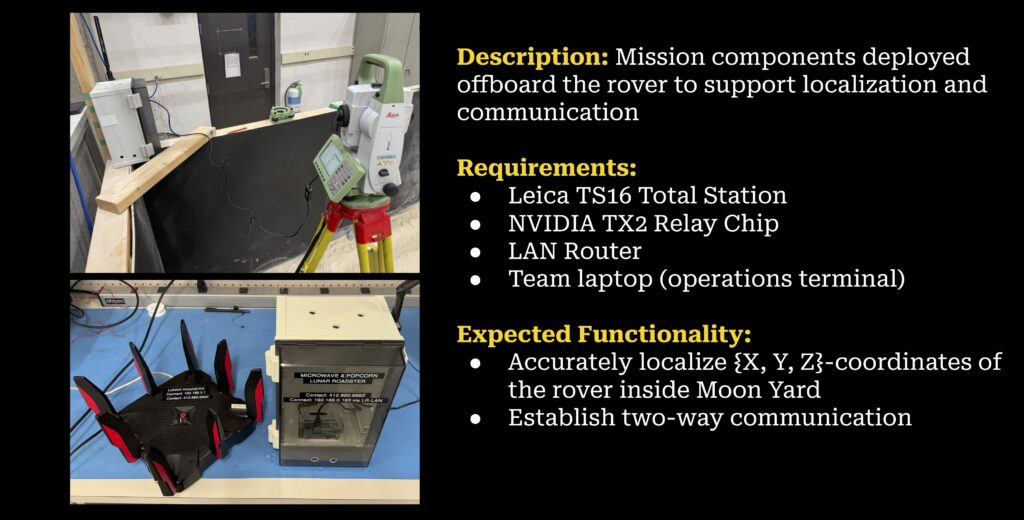
External Infrastructure Subsystem


Mechanical Subsystem
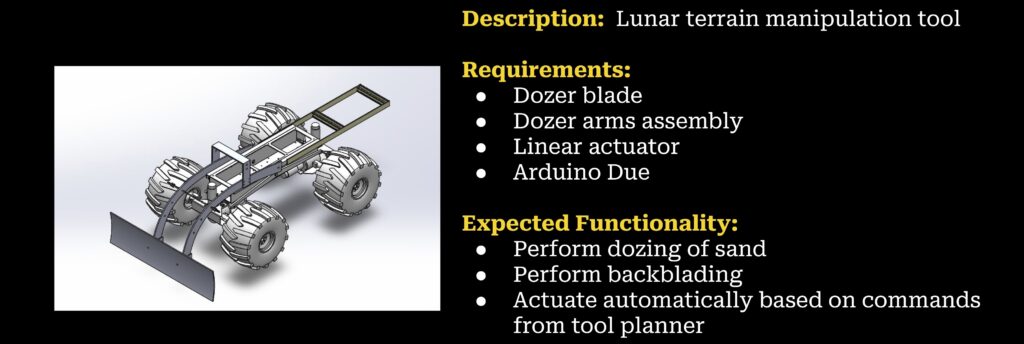
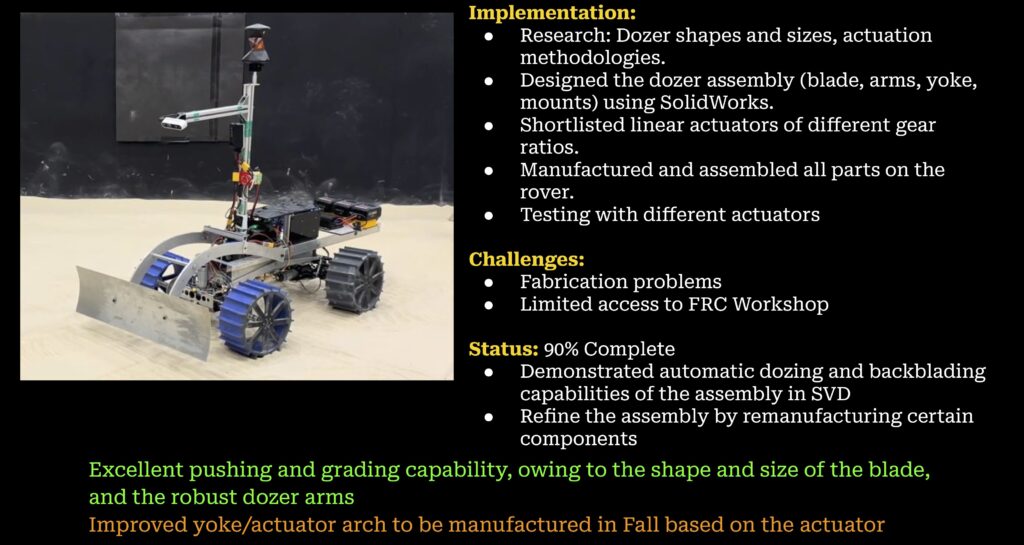
Dozer Assembly Unit


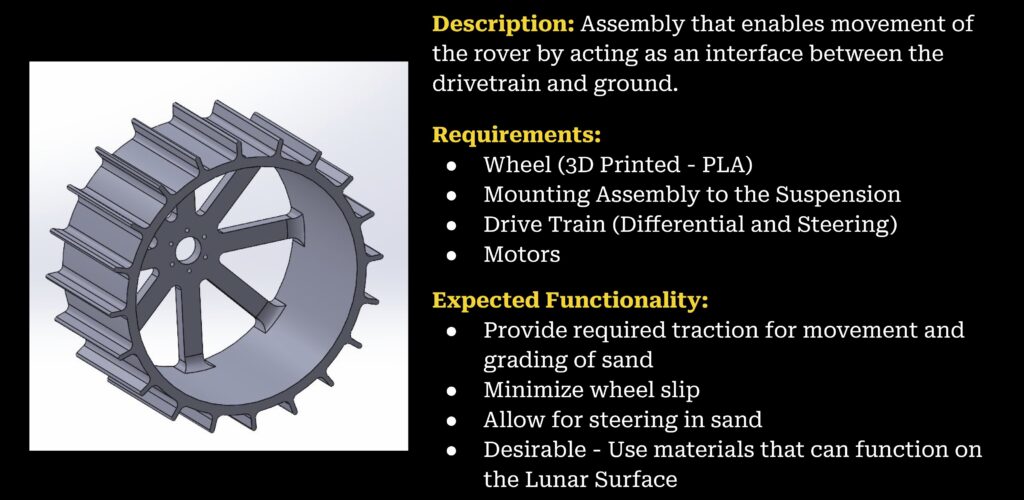
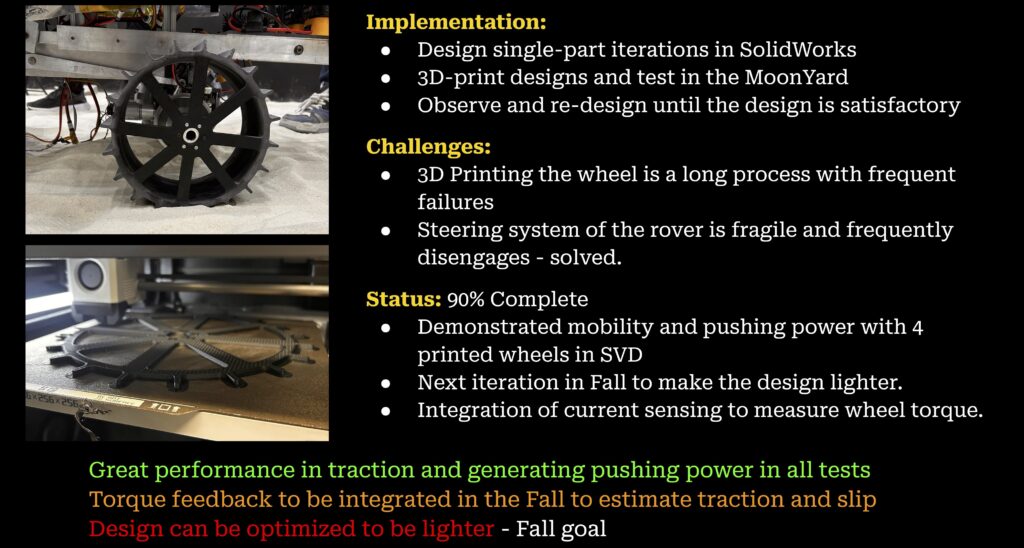
Wheel Assembly Unit


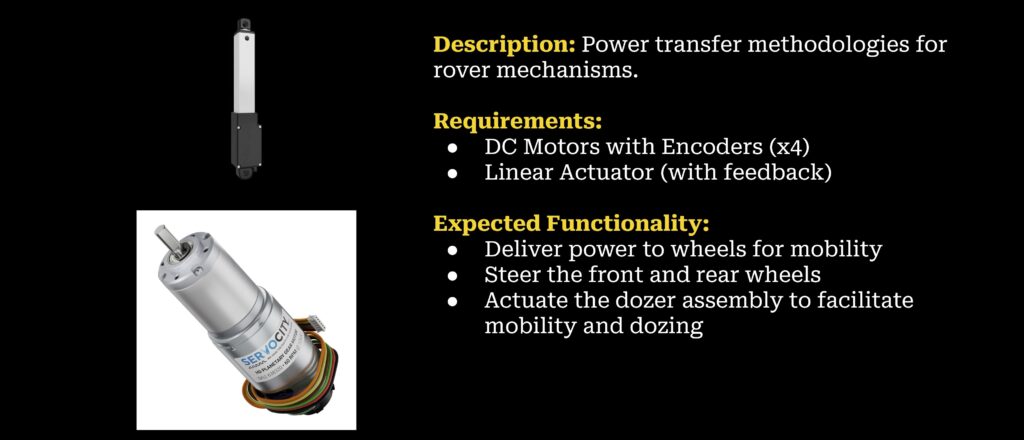
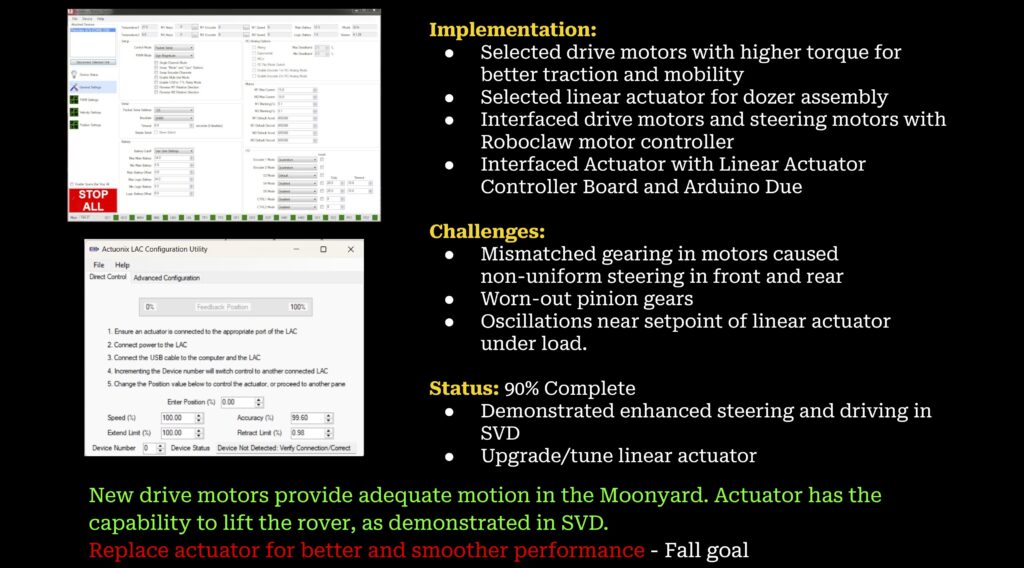
Actuation Subsystem


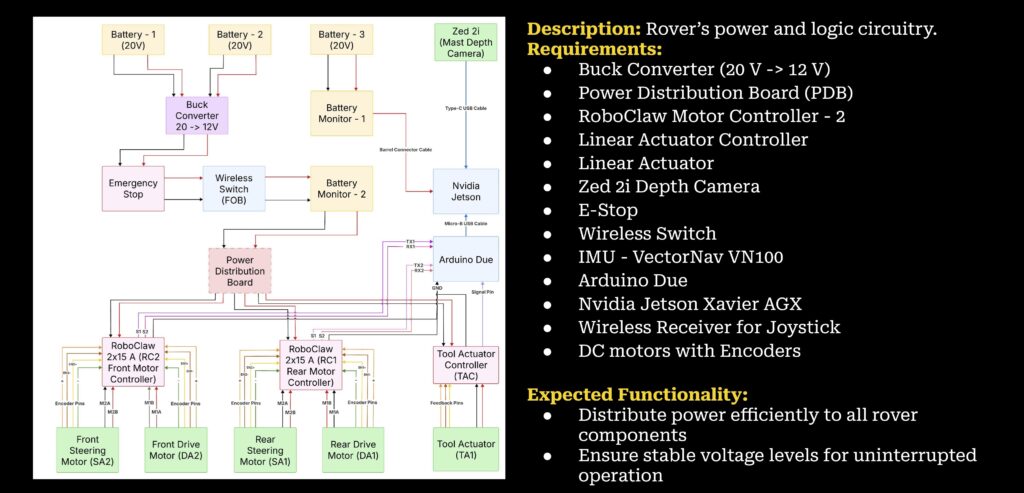
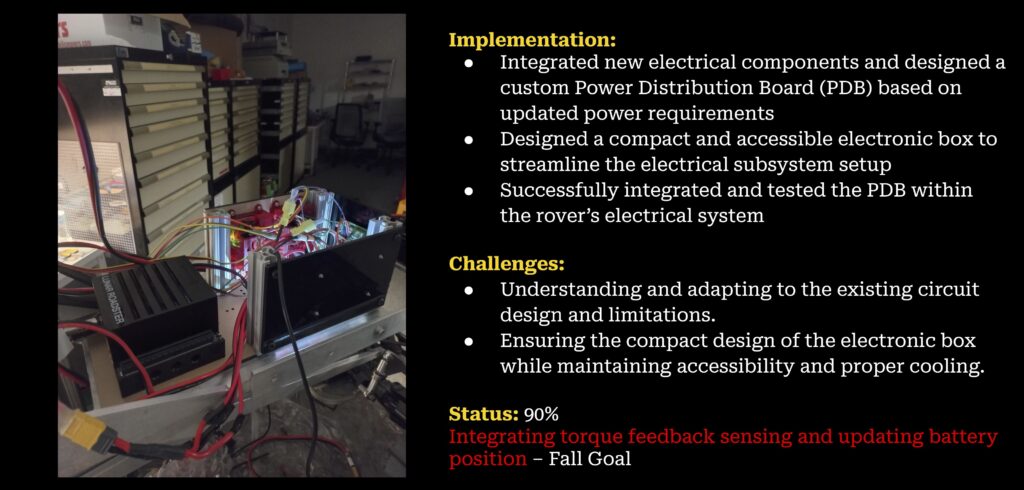
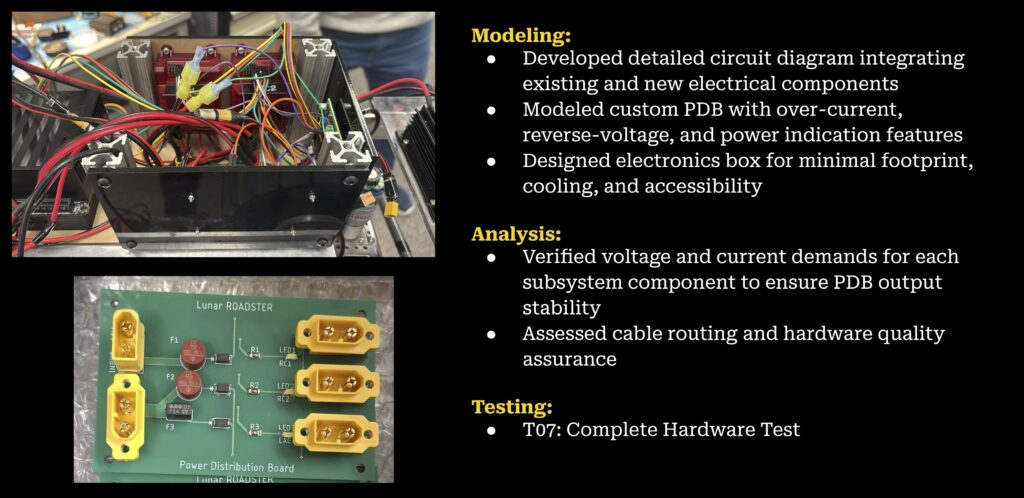
Electrical Subsystem



Spring Semester Completion Status
Sensors Subsystem
Computations Subsystem
Jetson and Docker Unit
Localization Unit
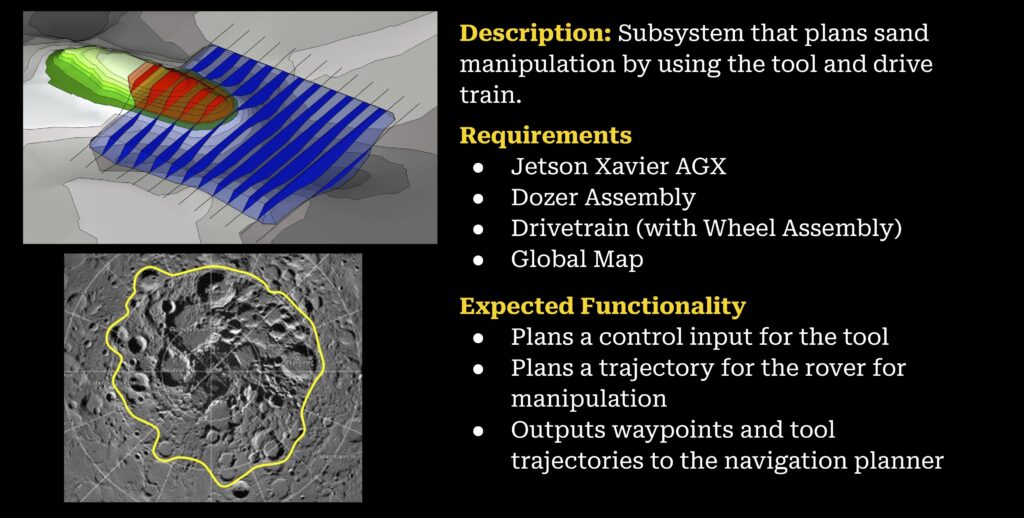
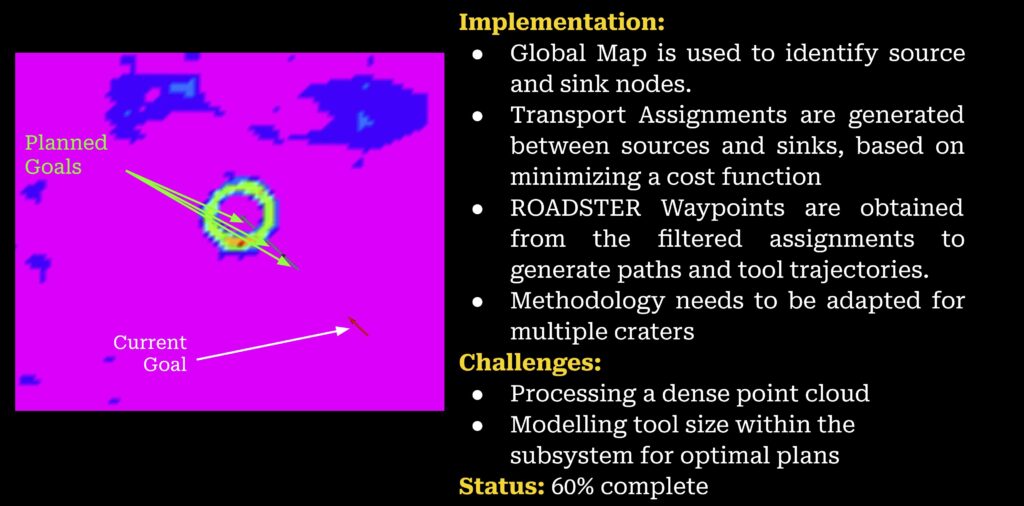
Tool Planner Unit
Navigation Planner Unit
Validation Unit
FSM Planner Unit
External Infrastructure Subsystem
Mechanical Subsystem
Dozer Assembly Unit
Wheel Assembly Unit
Actuation Subsystem
Electrical Subsystem