The Big Idea
The Lunar Polar Highway

Is it possible for a solar-powered rover to repeatedly drive around the Moon and never encounter a sunset?
Sun-synchronous circumnavigation around Moon at 28 days x 24 hr = 672 hour sun rotation.
Jogging speed if the route was flat, circular and traversable:

Problem Description
Humanity is preparing to return to the Moon, with the Artemis missions focusing on exploring the South Pole — a region rich in sites of interest. Establishing a circumnavigating route around the lunar pole will serve as a critical “highway” connecting these sites and enabling key activities such as transportation, human settlement, and resource extraction.
A solar-powered rover capable of sun-synchronous circumnavigation could achieve perpetual operation by avoiding lunar sunsets. At high latitudes, this is feasible at low speeds. However, these assumptions rely on the terrain being flat and traversable, free from major topographical challenges. A mission to manipulate the lunar regolith in the circumnavigating path to make it more traversable for future missions is thus, a clear step forward. A robotic system can be designed to conduct these operations efficiently for extended durations.
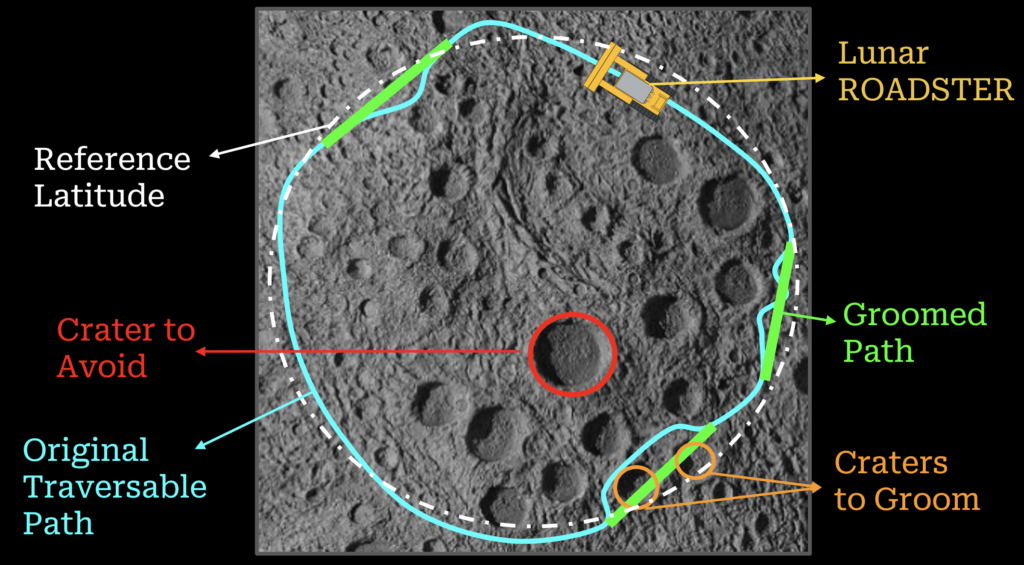
The Lunar Robotic Operator for Autonomous Development of Surface Trails and Exploration Routes (Lunar ROADSTER) is an autonomous moon-working rover, capable of finding exploration routes and grooming the lunar surface to develop traversable surface trails. These groomed trails will become the backbone for the colonization of the Moon by enabling transportation, logistics, and enterprise development.
Circular Path Grooming
Use Cases
A road is being built to connect two lunar bases on the polar region of the moon. At the lunar base, the Lunar ROADSTER is given a detailed map of the lunar polar region.
The rover calculates a suitable path that connects the two bases that is free from large obstacles and craters. Once outside, the Lunar ROADSTER observes its surroundings and localizes its position. It then departs the lunar base and follows the planned trajectory.
However, after traversing 500 meters, the rover notices a large obstacle in the path of the trajectory. The rover adjusts its planned path to navigate around the obstacle and alerts the lunar base of the updated trajectory.
The Lunar ROADSTER approaches a shallow crater in the route of the planned path. After already determining that it is not feasible to adjust to a new path that circumvents the crater, the rover beings to fill in the crater.
Luckily, the periphery of the crater has some excess regolith to fill in the crater. The rover takes the excess regolith from the dune and pushes them into the crater. During excavation, the rover slipped on the loose regolith and falls into the crater.
Luckily, the rover was built for such rugged terrains and easily climbs out of the crater and continues on excavating. Finally, it grooms the filled in crater to make it smooth.

After smoothing the crater, the rover backs up to view the groomed crater and validate the job. However, the rover determines that the groomed crater is still to steep and does not make a satisfactory trail. The rover returns to the crater location to re-groom the crater and make it smoother.
After the second attempt, the rover validates that the trail is now satisfactory. It sends this information to the user and continues on navigating the planned path.