Fall Test Plan
Our full fall test plan documentation is available here: Fall Test Plan
Our schedule for the fall test plan is shown below:

For the Fall Validation Demonstration, we plan on testing the following requirements:

Our test verification data and completeness is shown here:
Spring Test Plan
Our full spring test plan documentation is available here: Spring Test Plan
Our schedule for the spring test plan is shown below:
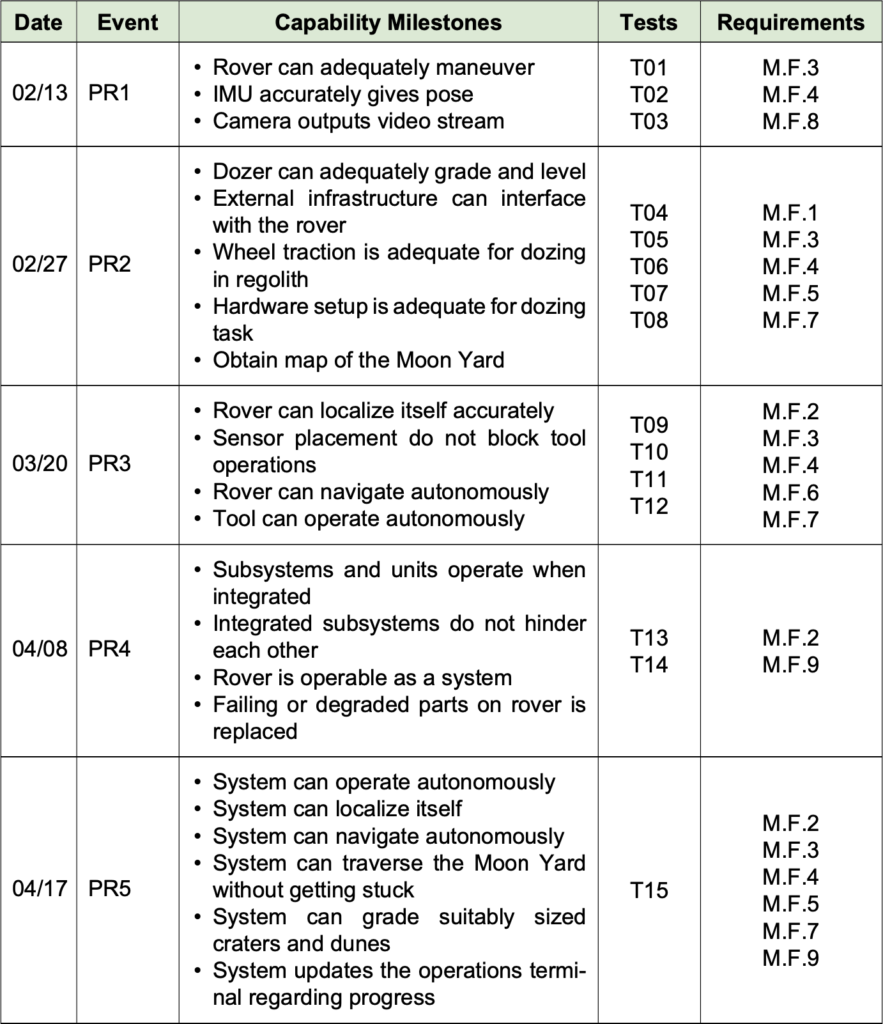
For the Spring Validation Demonstration, we plan on testing the following requirements:
Our test verification data and completeness is shown here:
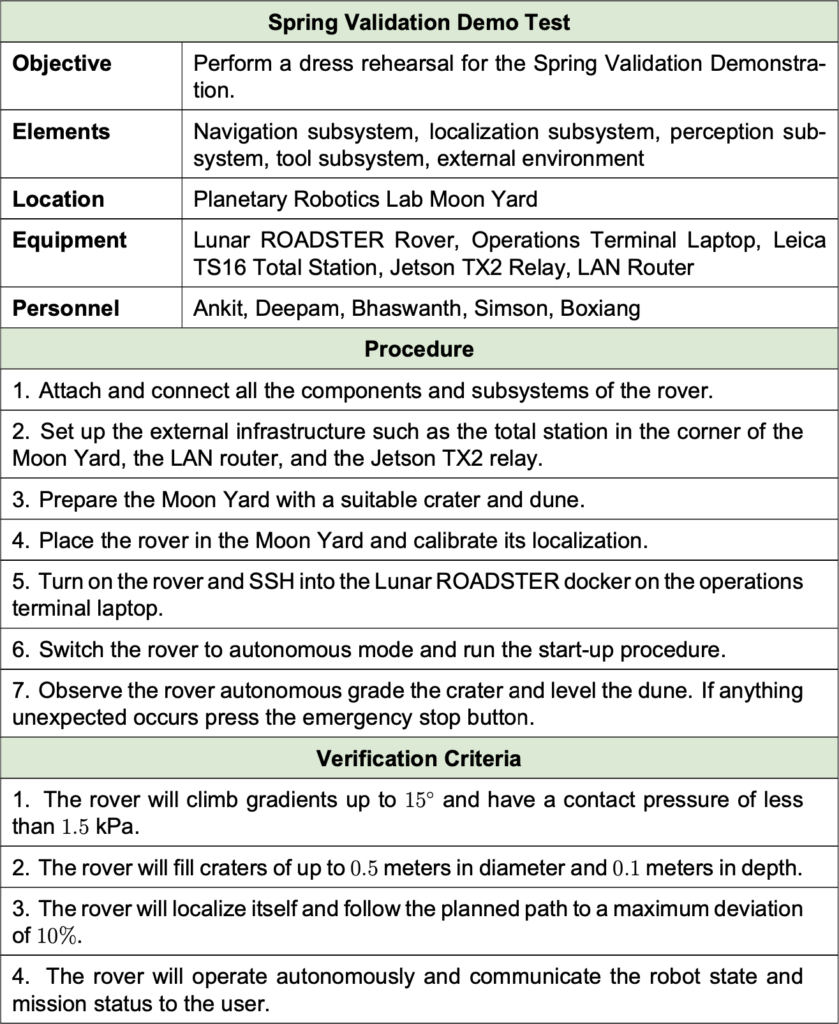
Spring Validation Demonstration Plan
| Objective | F.R. | Success Criteria |
|---|---|---|
| Traversability | M.F.5 | Will climb gradients up to 15° and have a contact pressure of less than 1.5 kPa. [M.P.3] |
| Tool Operation | M.F.6, M.F.7 | Will fill craters of up to 0.5 meters in diameter and 0.1m in depth. [M.P.5] |
| Navigation | M.F.3, M.F.4 | Will localize itself and follow planned path to a maximum deviation of 10%. [M.P.2] |
| Autonomous Operation | M.F.2, M.F.9 | Will operate autonomously and communication robot state and mission status to the user. |
Descriptions:
- Location: MoonYard in the Planetary Robotics Lab. Craters constructed to emulate a possible straight groomed path.
- Needed Equipment: ROADSTER with Tools, Total Station, Operations Terminal, Survey LiDAR to build 3D Map.
- Procedure: 3D Map of the MoonYard is fed to the rover along with a pre-planned straight path. ROADSTER autonomously grooms the trail while the user monitors the mission using the operations terminal.
Fall Validation Demonstration Plan
| Objective | F.R. | Success Criteria |
|---|---|---|
| Trail Path Planning | M.F.1 | Will plan a path with cumulative deviation of <= 25% from chosen latitude’s length. Will avoid craters >= 0.5 metres and avoid slopes >= 15° [M.P.1, M.P.4] |
| Validation | M.F.8 | Will groom and validate the trail to have a maximum traversal slope of 5° [M.P.6] |
Descriptions:
- Location: MoonYard in the Planetary Robotics Lab. Craters constructed to emulate a circuitous/semi-circuitous path.
- Needed Equipment: ROADSTER with Tools, Total Station, Operations Terminal, Survey LiDAR to build 3D Map.
- Procedure: 3D Map of the MoonYard is fed to the rover along with a pre-planned ideal path. ROADSTER autonomously grooms the trail while the user monitors the mission using the operations terminal. The path is validated and a mission complete signal is sent to the user.