Cyberphysical Architecture
Cyberphysical Architecture
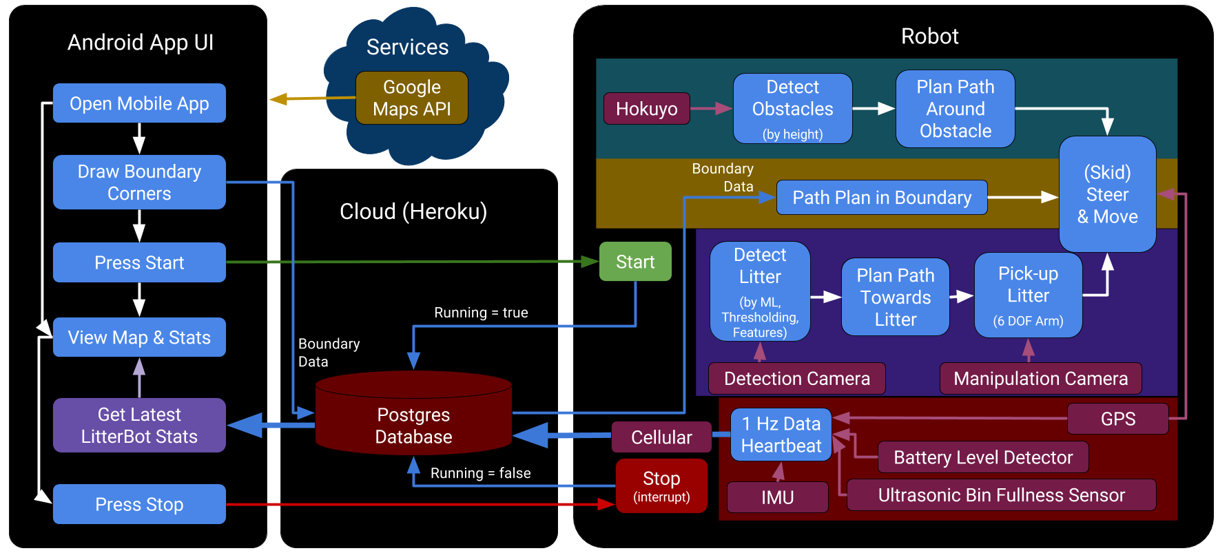
The cyber-physical architecture can be broken down into three parts. The first part is the user interface. This includes the app interface that will allow the user to input the boundary selection. Currently, only a rectangular boundary is allowed to simplify the issue of path planning and navigation for the robot. Here we will be using the Google Maps services to give the user a perspective of where he or she is and where the robot will be working. This data is then sent to the cloud. Both the start and stop commands are sent to the robot via the cloud. The user interface will also be able to show feedback data from the robot whenever the user opens the app after starting the robot.
The second part of the architecture is the cloud. We are using the cloud for two different purposes. First, the cloud provides a connection interface to the robot. The cloud acts as a middleman between the robot and the user. The second usage for the cloud is as a logging point for the robot. The robot will be storing its feedback data and diagnostic data on the cloud. This information will be made available to the user when the user opens the app.
The third part of the architecture is Mell-E, the robot. Mell-E will follow a straight forward command loop. Once Mell-E receives the start command from the cloud, it will start to get the perception data via its camera and other sensors. It will also get its location from the GPS module on board. Based on these data, Mell-E will start moving and if it finds an obstacle it will plan its path around the obstacle. If Mell-E encounters litter, it will plan a path to get in position to remove it. Once Mell-E identifies the litter, it will move closer to the litter and it will pick up the litter. It will keep doing this until either it is asked to stop by the user or if the bin is full. All its diagnostic data such as battery level, current location, bin “fullness” and other data will be stored locally on a database and sent to the cloud database as a heartbeat signal once every second.
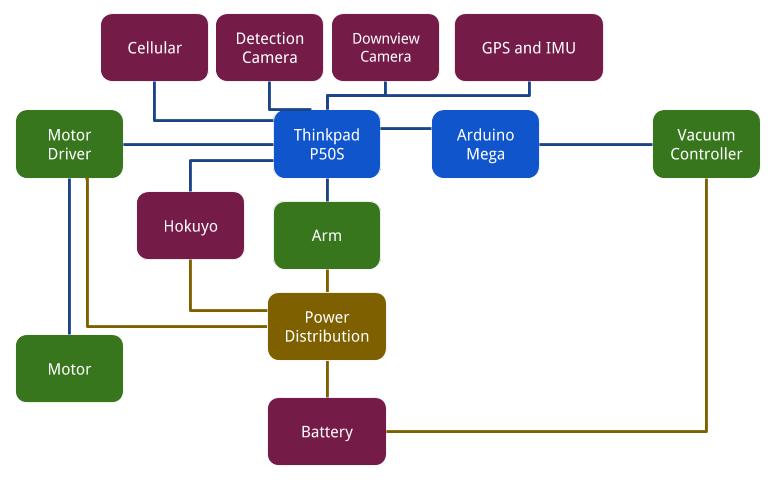
The cyber-physical architecture emphasize the “hard ware” of the system. The red boxes are necessary electronic parts including sensors, battery, cameras, GPS and IMU. The green parts are actuators including motor and motor driver, arm and vacuum. The blue boxes are two computers, Arduino Mega and Thinkpad laptop which we got from MRSD. We also have power distribution to provide suitable voltage towards motor driver, Hokuyo and arm, while vacuum has its own battery.