This section describes the cyberphysical architecture of the system. A graphical representation of the cyberphysical architecture is presented in Figure 1.
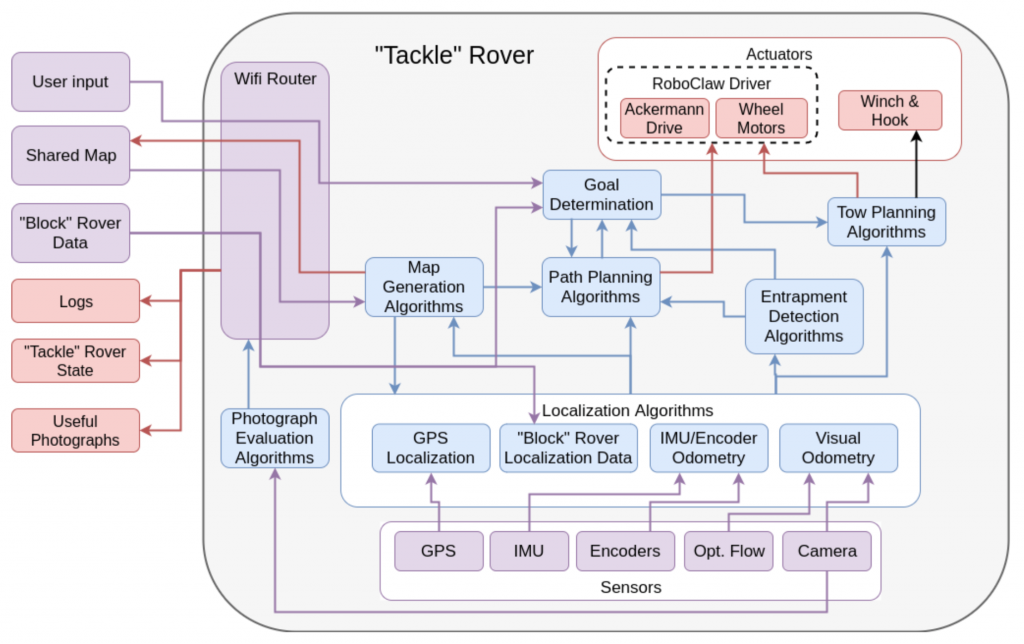
In order to provide and gather information to and from the rovers, an interface is defined which involves a user to input way points for the rovers to navigate, display of a shared map that is updated by the rovers as they navigate through the environment, data logs pertaining to the ’stuck’ rover when it sticks and the ’tackle’ rover when it is designated to provide assistance, and general periodic logs of the rover states through the course of mission.
Each of the rovers is equipped with multiple sensors namely, GPS, IMU, encoders, optical flow sensors and camera. The GPS sensor allows for GPS localization which in turn enables rovers to navigate through the way points set by the user. In addition to providing photographs of the environment, camera, coupled with optical flow sensors, shall allow for visual odometry. IMU and encoders provide IMU/encoder odometry as editable from the figure.
Collectively, the sensors enable localization of the rovers, entrapment detection in case a rover is stuck and build shared terrain map generation. Planning algorithms typically require current state of rover, goal state of rover and state of the environment or world around it in order to plan a path from its current state to the goal state. The odometry information of the rovers along with the map of the environment and the rover’s localization information in it is passed to the planning algorithms modules to plan necessary sequence of actions. These sequence of actions is either rescuing the stuck rover in case of entrapment or navigating in the environment. Goal determination module generates a goal state of the rover based on the on ground scenarios which can be a user defined way point in case of exploration phase or a location of the stuck rover in case of entrapment. This goal state is forwarded to the aforementioned planning module.
Once sequence of actions have been planned in accordance with the situation at hand, actuators are called upon to execute the planned action which involve Ackerman Drive, turning wheel motors in a specific direction and activating towing magnets for towing in a rescue operation.