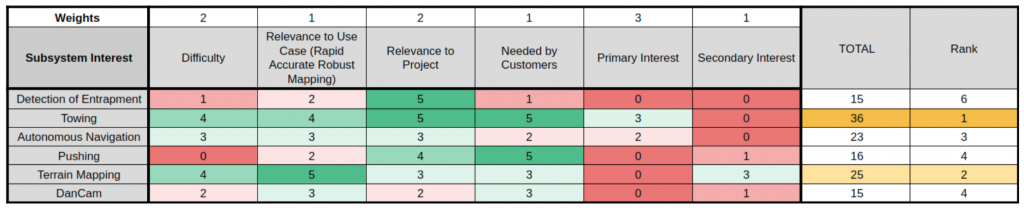
The project has many semi-independent subsystems, and most of them could have proved worthy ground for the main focus of the project. To prevent overreaching, we decided to do a comparison of several of the major elements of the project to decide what to focus on. This study is depicted in figure 1. The comparison accounted for difficulty of a topic, its relevance to the overall idea of a topic, and the group’s general interest in a topic. We decided a medium-to high difficulty of topic was ideal, and as such discounted pushing (instead of towing) as too hard. After weighting and summing each topic, Towing came out as a clear winner, with autonomous terrain mapping in second place. Accordingly, we’ve decided to primarily focus on the problem of the immediate actions required to tow a stuck rover out of its problem in the first semester, and build that system out into a robust autonomous mapping system in the second semester.
While the rovers already have sensors, none of those sensors are particularly well suited to accurately imaging another rover’s pose. We intend to add systems better suited to close-range pose estimation for the FVE, and so investigated several such systems. This study is depicted in figure 2. Global localization needs are almost entirely met by the differential Piksi GPS system.
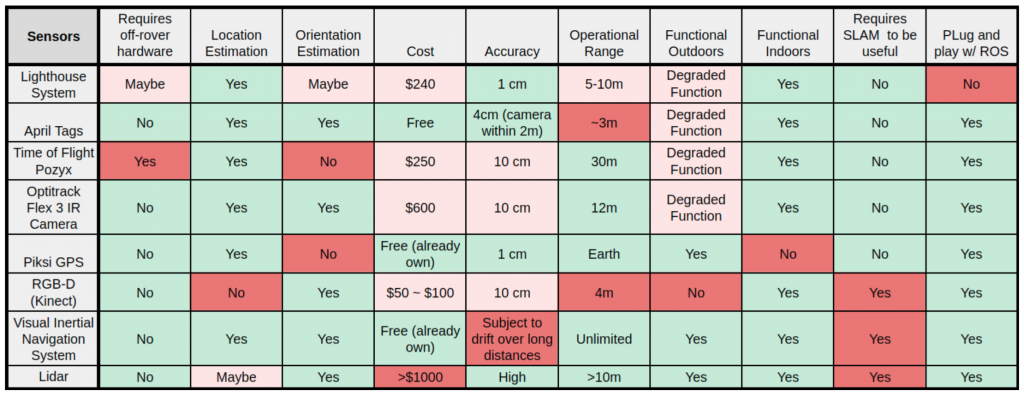
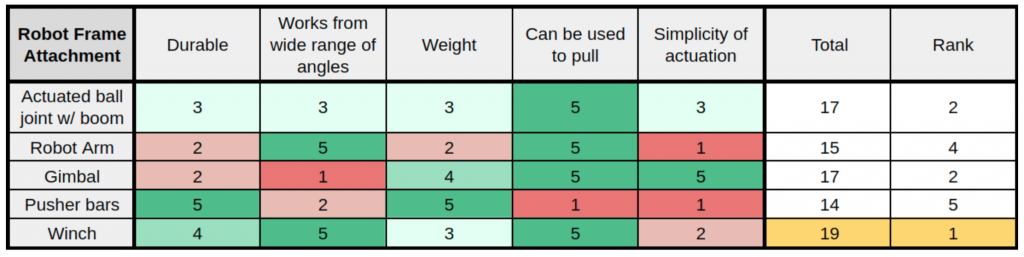
Figure 3 depicts consideration of various mechanisms for connecting the two rovers during pulling. Due to the wide variability of solutions, the actual grasping mechanisms were considered separately from the mechanisms used to tow. Our conclusion was that the traditional winch offers the best combination of simplicity of control and flexibility of orientation between the two rovers.
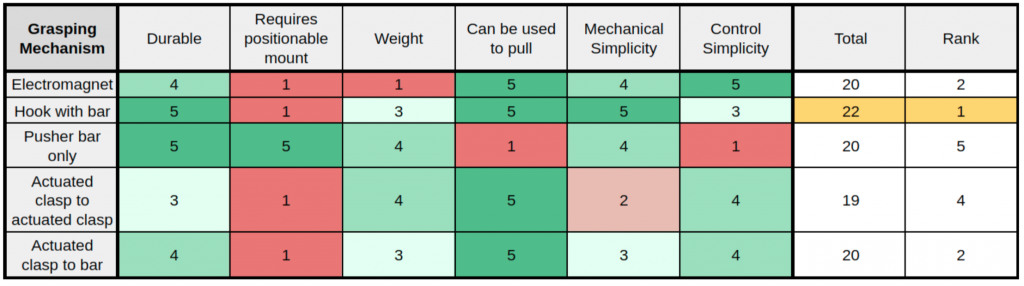
The grasping mechanism is the physical point of contact between two rovers. There are lots of alternatives of docking mechanisms. In our study, depicted in figure 4, we settled on a simple hook as the best combination of simplicity, durability and weight. However, there are some concerns about the ability of the hook/winch system to disengage from the towed rover, so this determination may change.