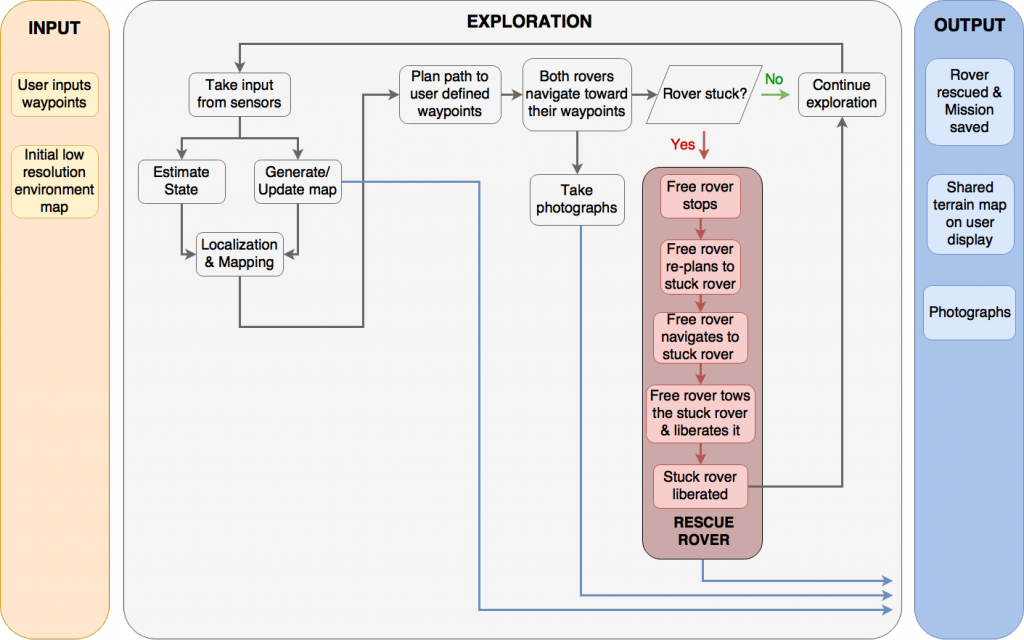
Functional Architecture
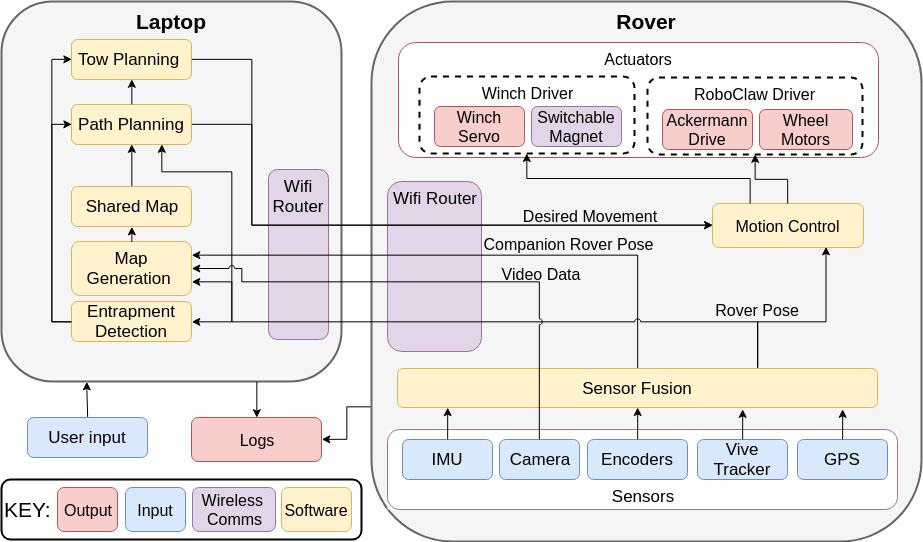
Cyberphysical Architecture
The focus of the project is to map an entrapment scenario and liberate the entrapped rover.
The rescuing operation would carried out by a peer-rover that is able to capture a 2nd person perspective of the scenario.
The entrapped rover is alternatively referred to as a stuck rover and the peer-rover that sets about to the rescue to the stuck rover is called a rescue rover or a rescuer.
A rover’s mathematical model (kinematics) are as follows:

Therefore, given its pose [x, y, Θ] we can control the actuators by using corresponding homogeneous transformations.