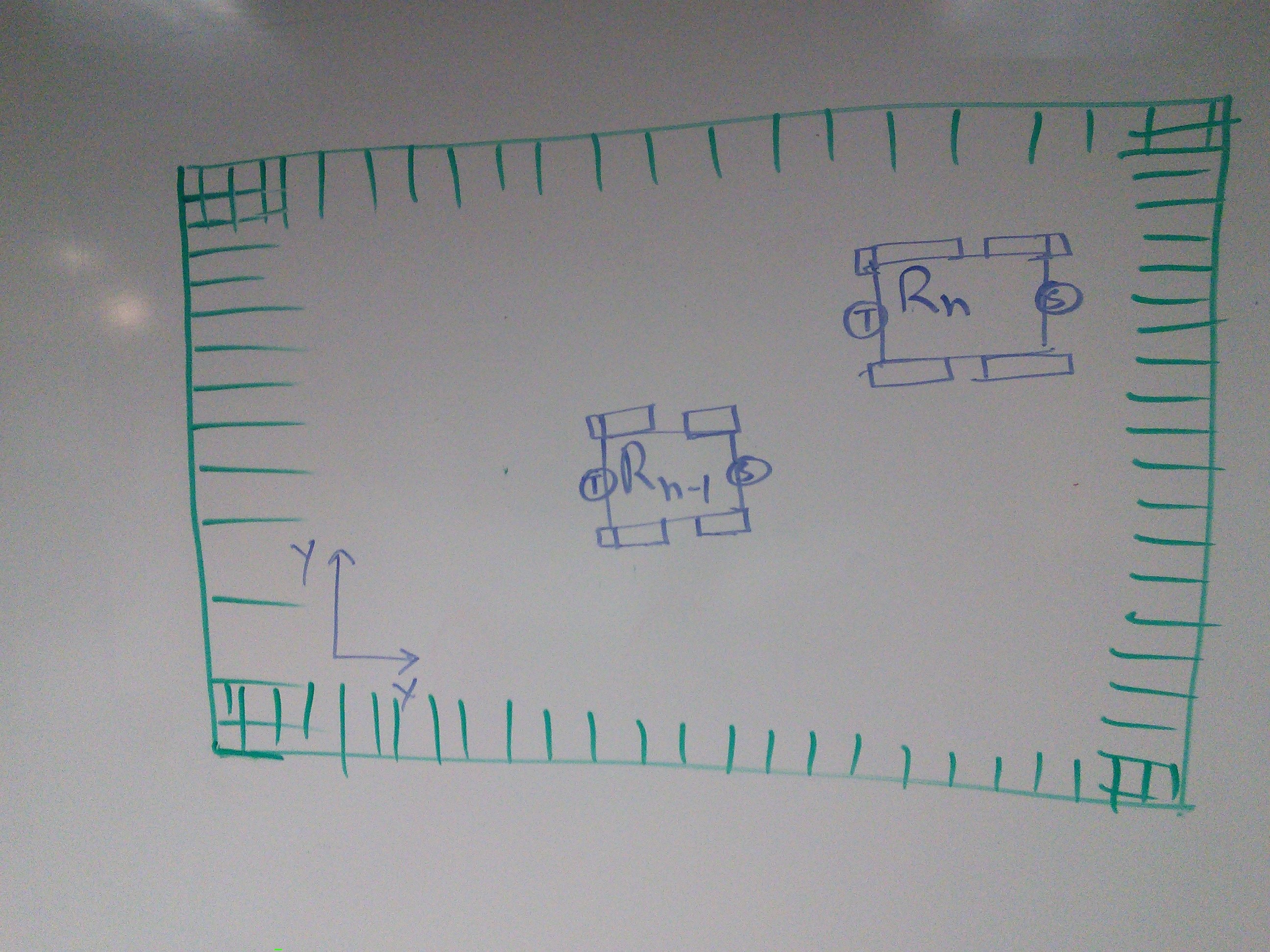
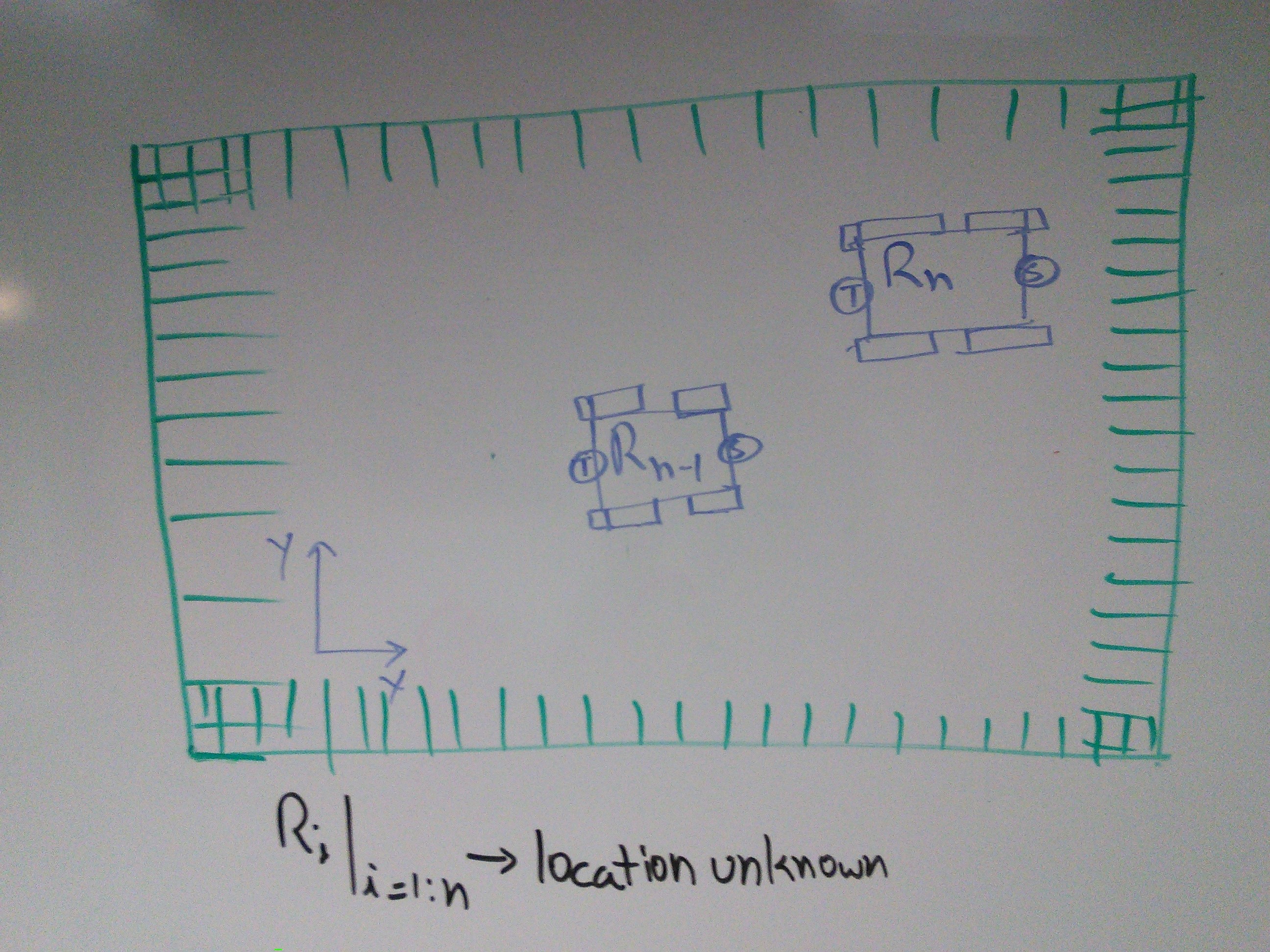
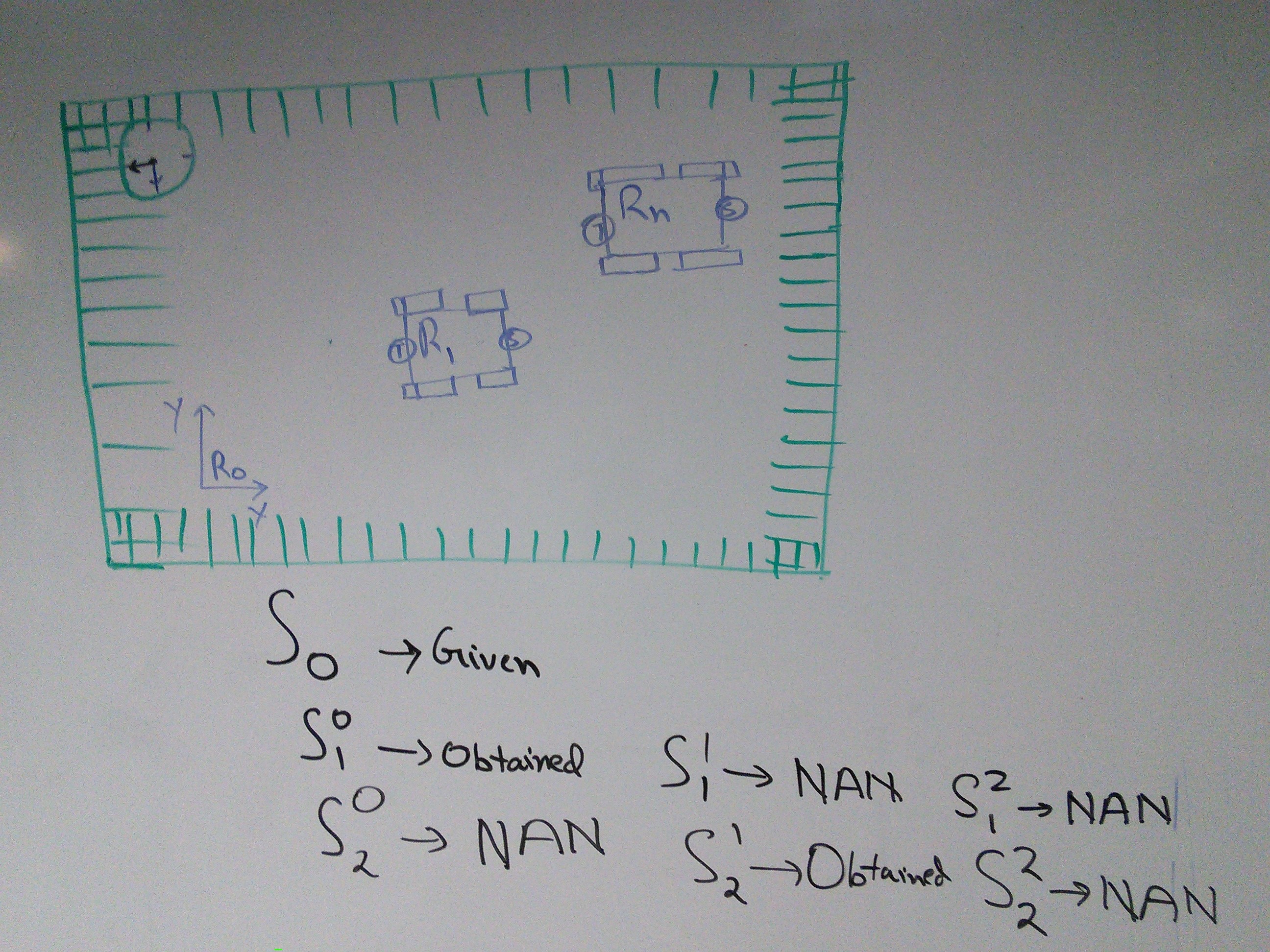
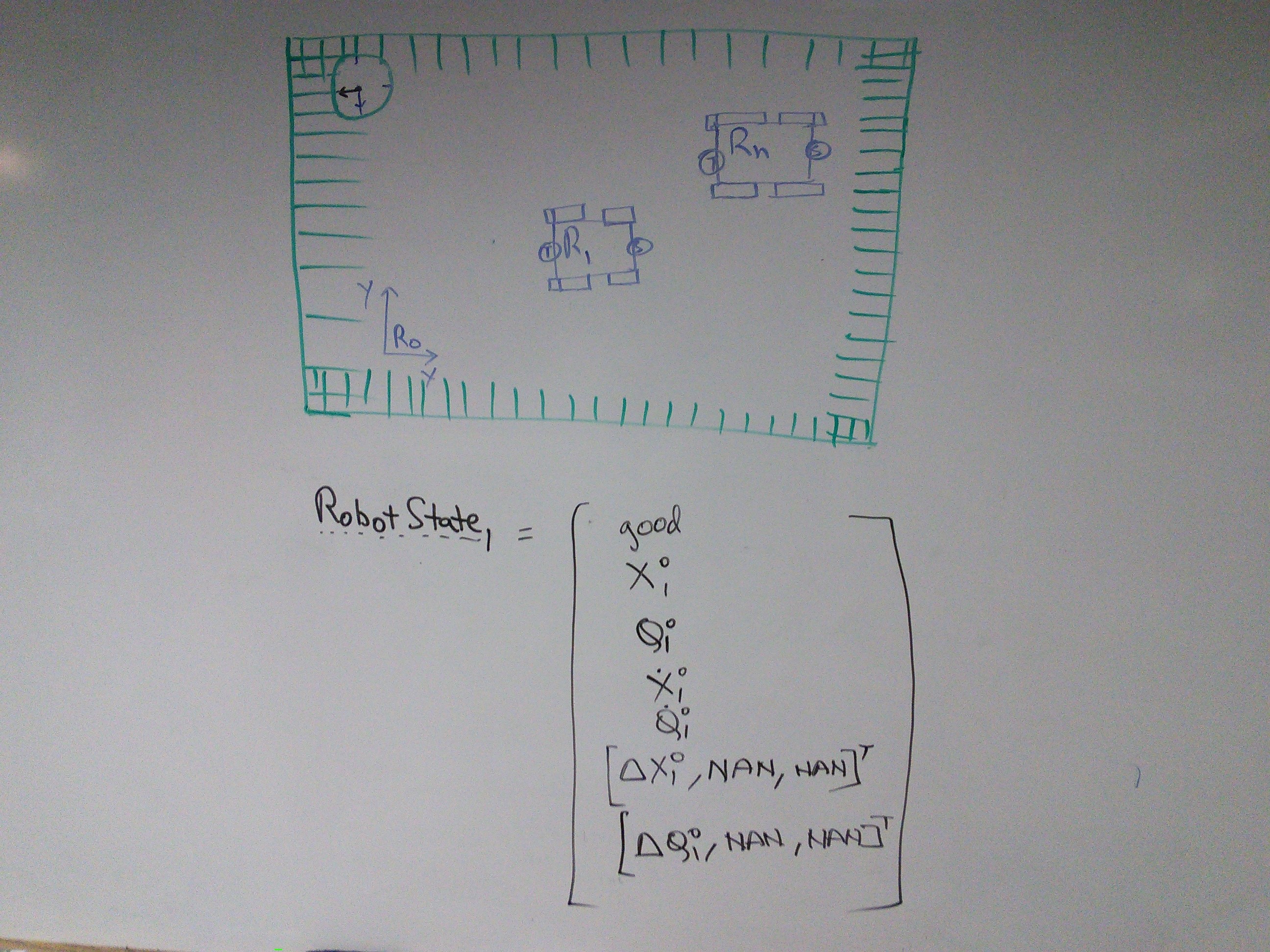
The rovers are operating within a range that is perceivable by the cumulative sensing range of the entities in the system. A rover’s position can be determined by at least one other rover in the system. Each rover sweeps for a set time T to aid in the self-pose determination of neighboring (within the sweeper’s field of view) rover.
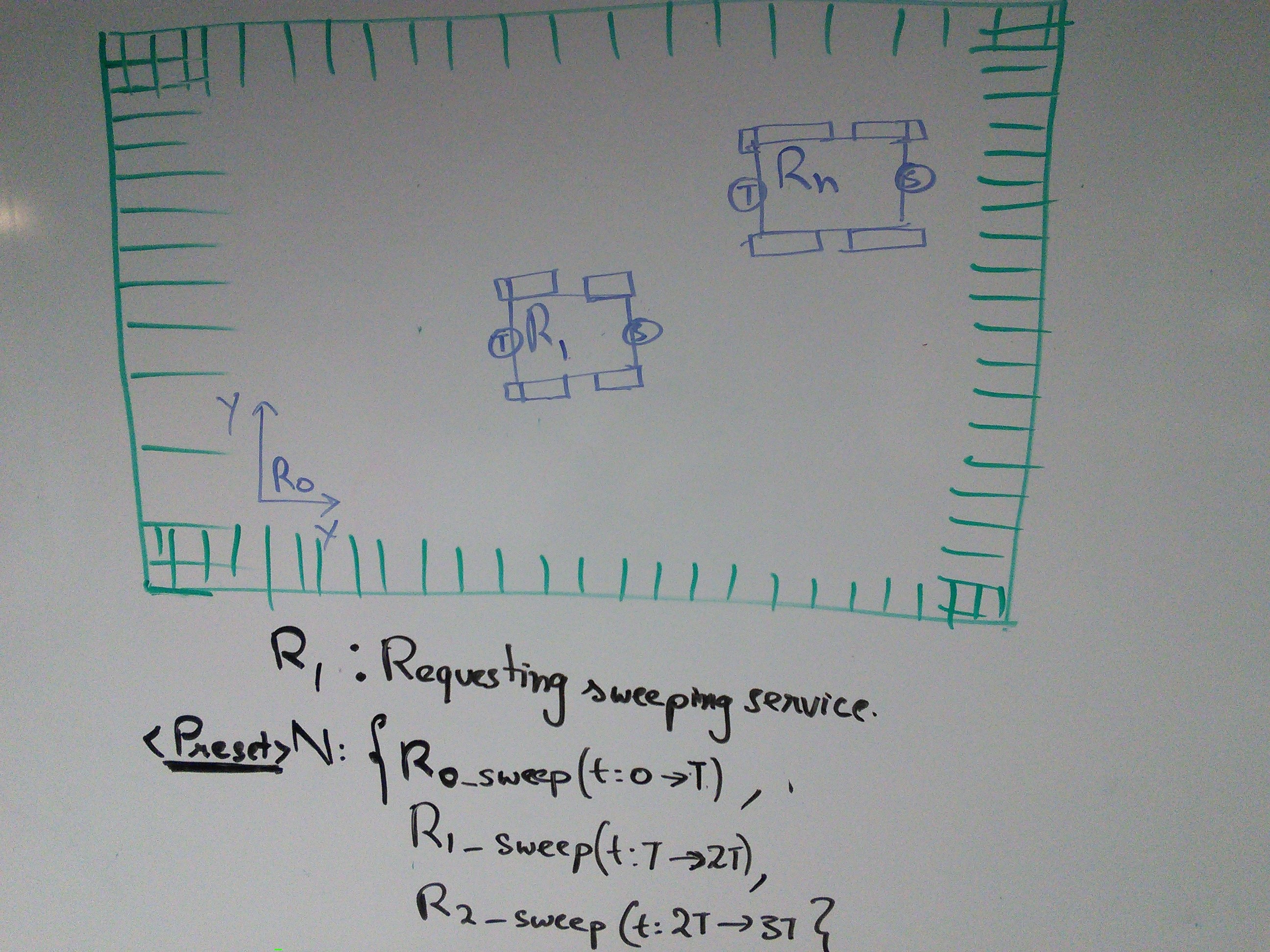
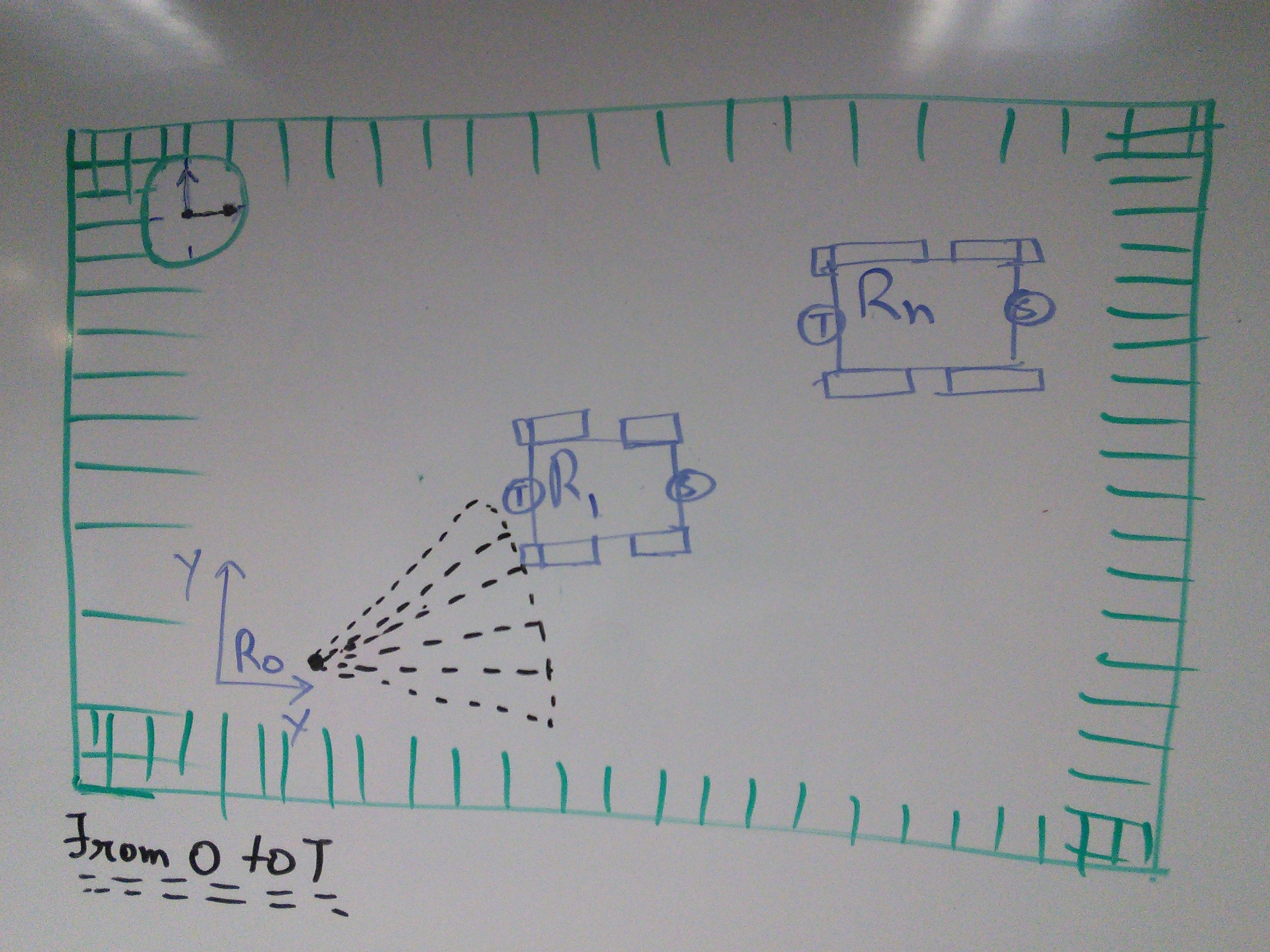
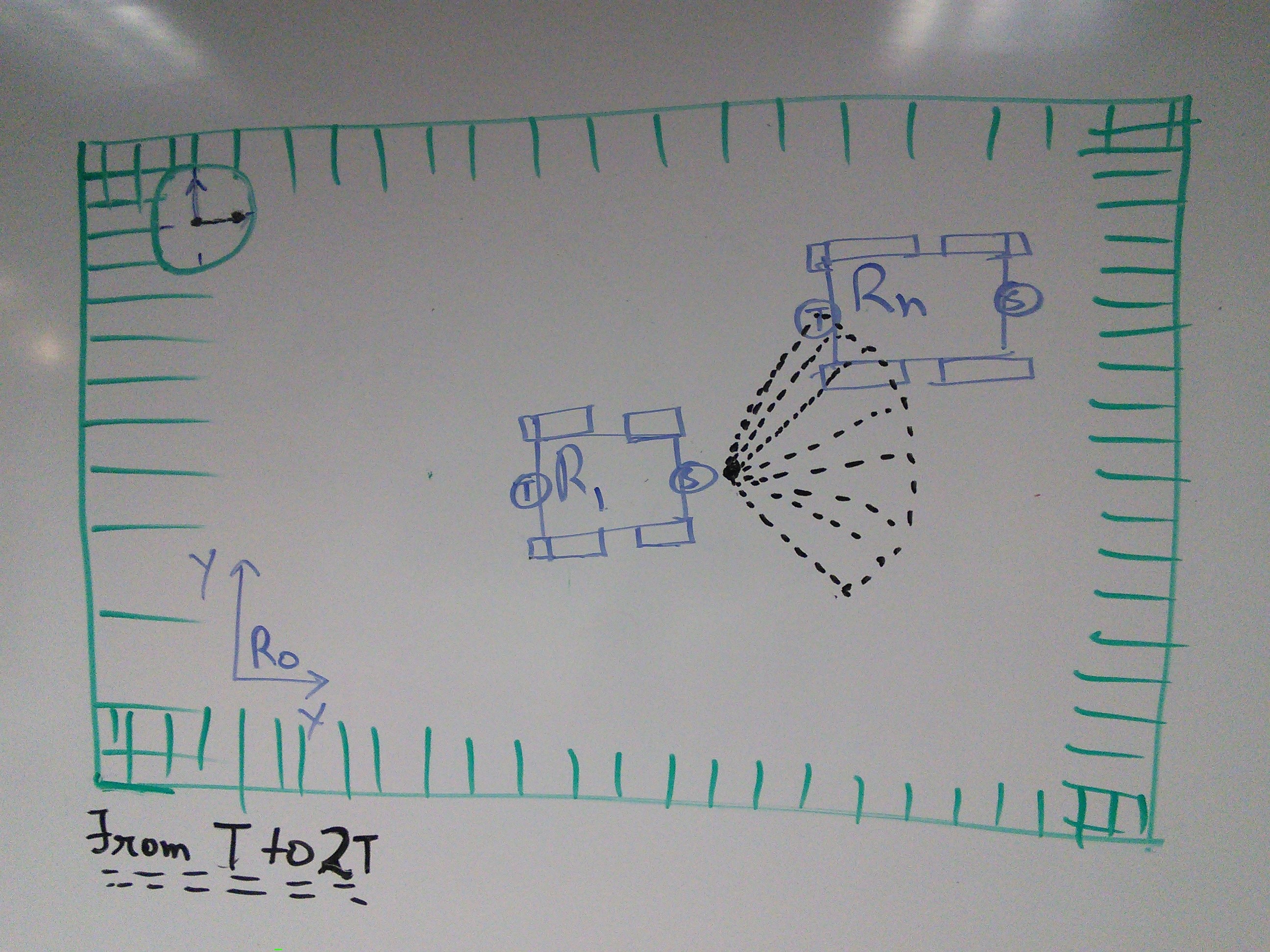
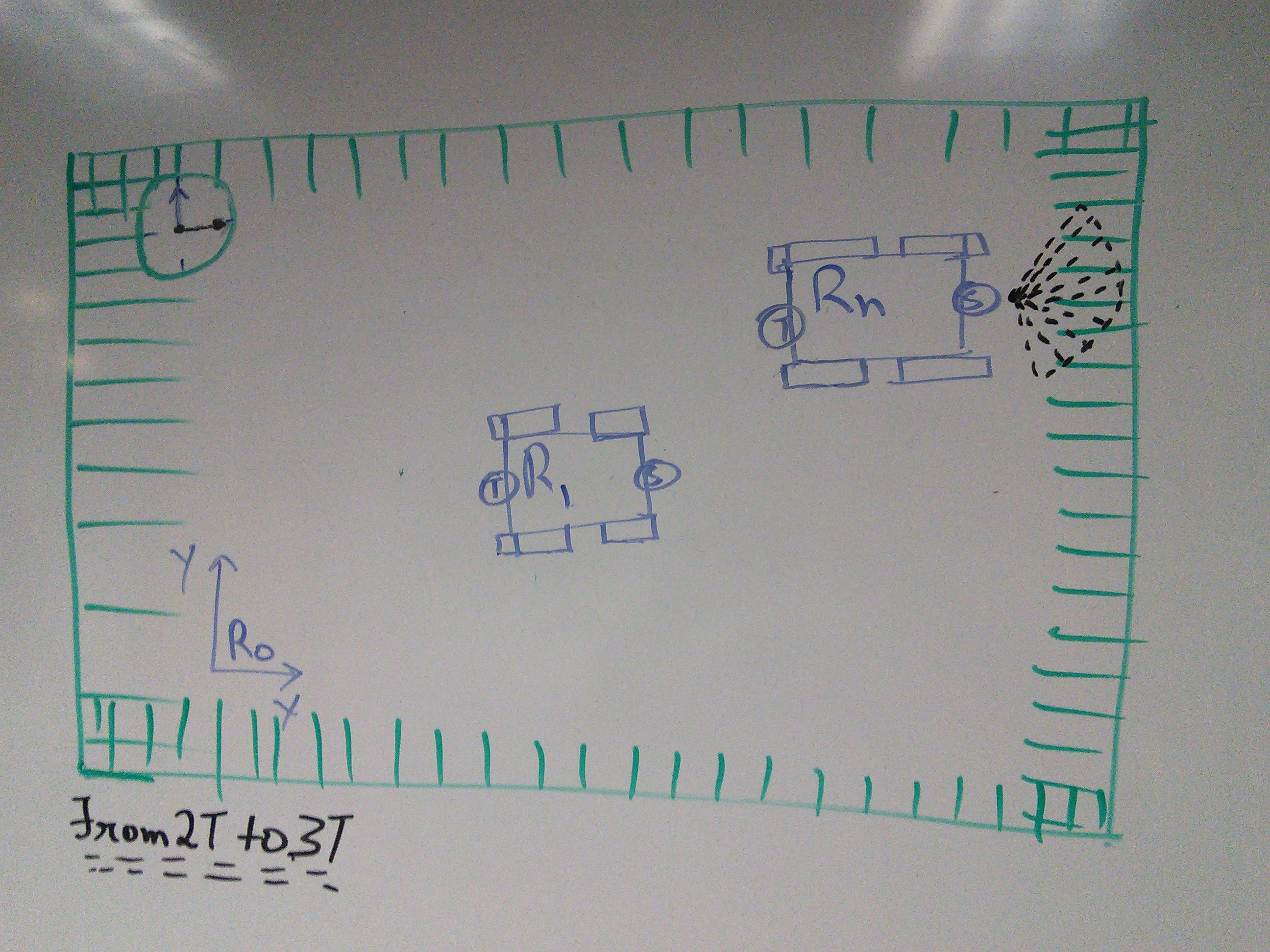
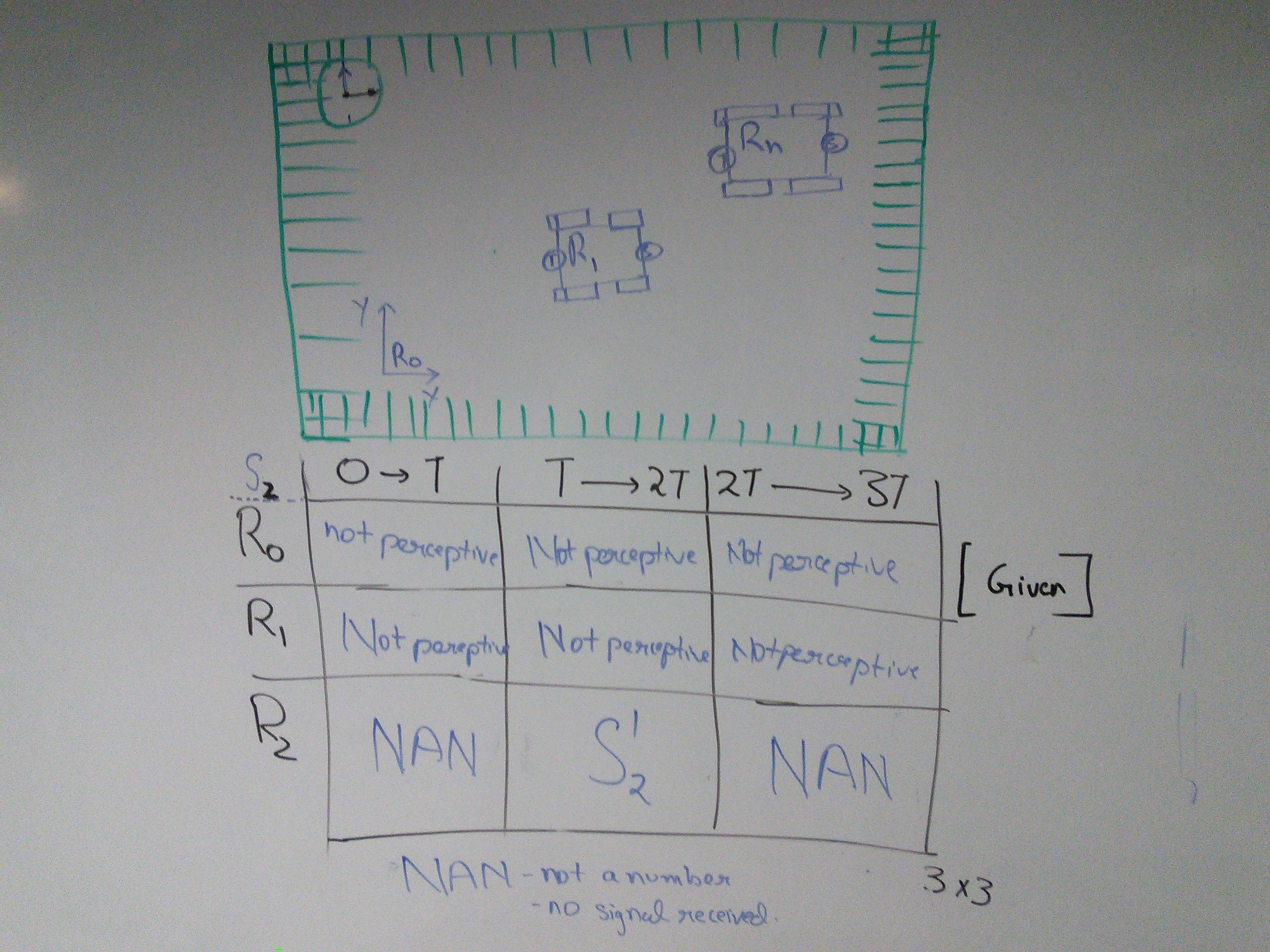
Every time a sweeping laser is intercepted by a HTC VIVE tracker which is mounted on a rover, the very same rover’s on-board computer gets an update relative pose. Thanks to our minimal operation of time-keeping on the network and prior knowledge (cloned into each entity in the system) of sweeping sequence of the rovers, the updated relative pose can be assigned a frame of reference. This information is then published in the network.
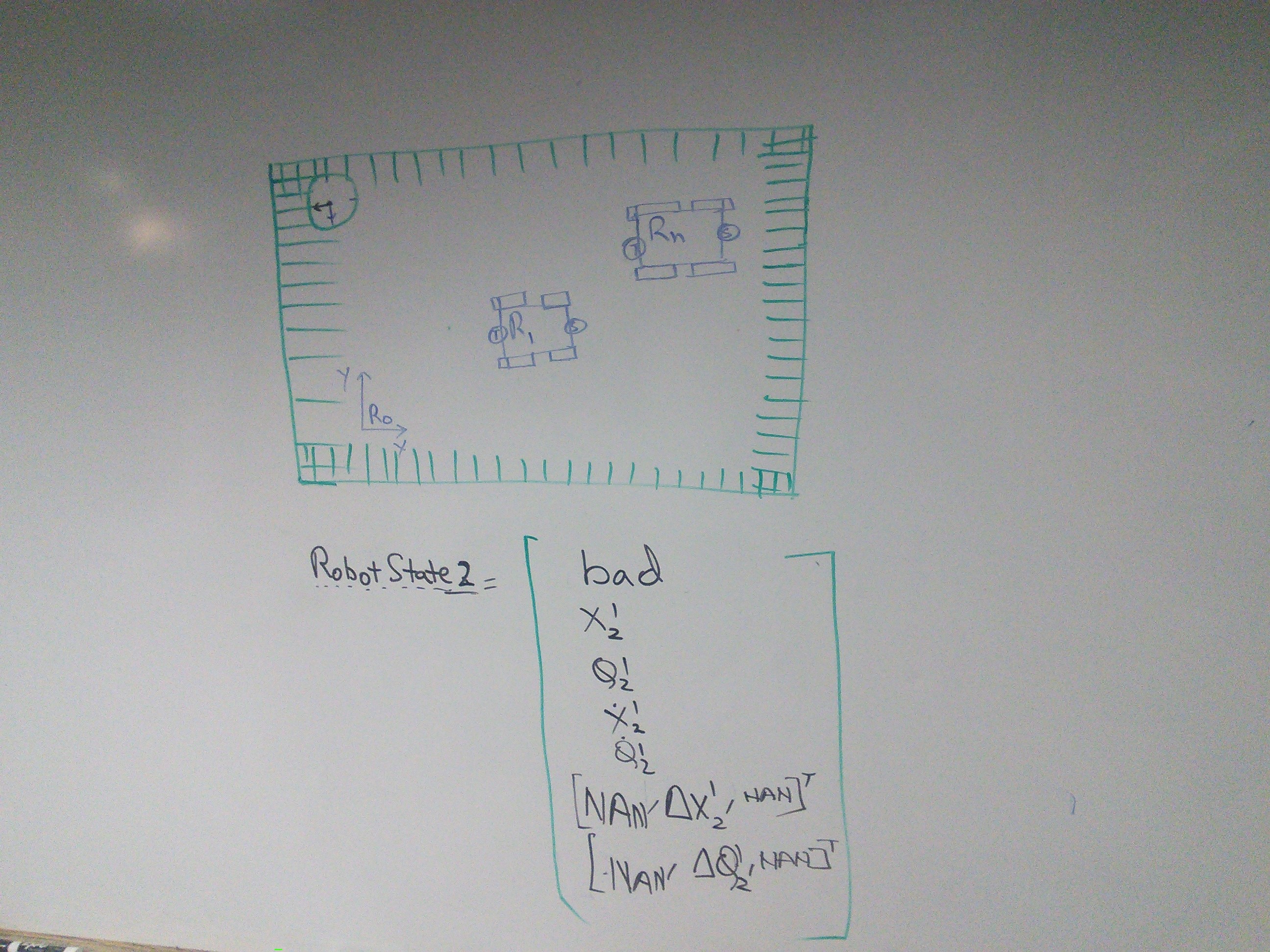
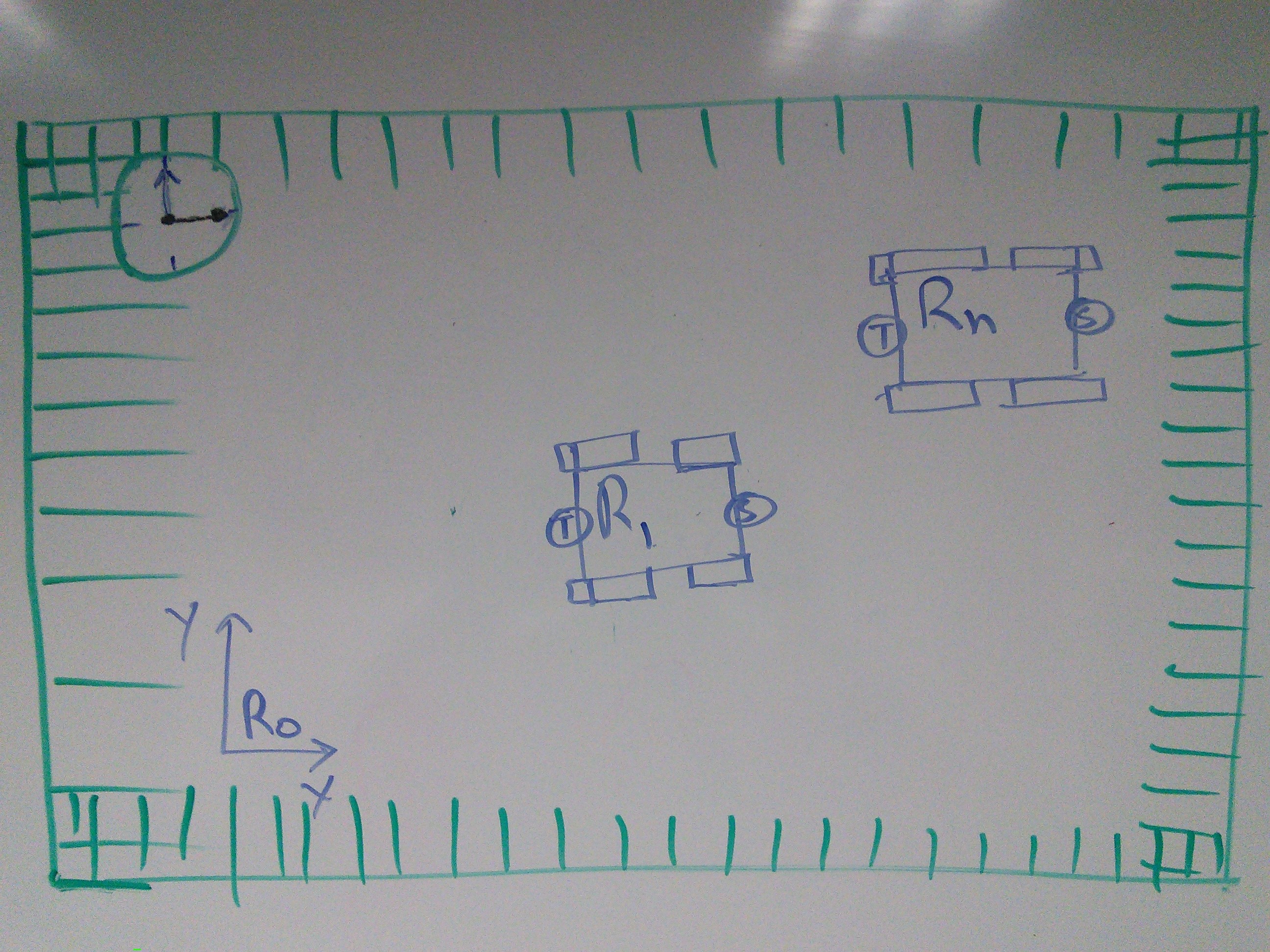
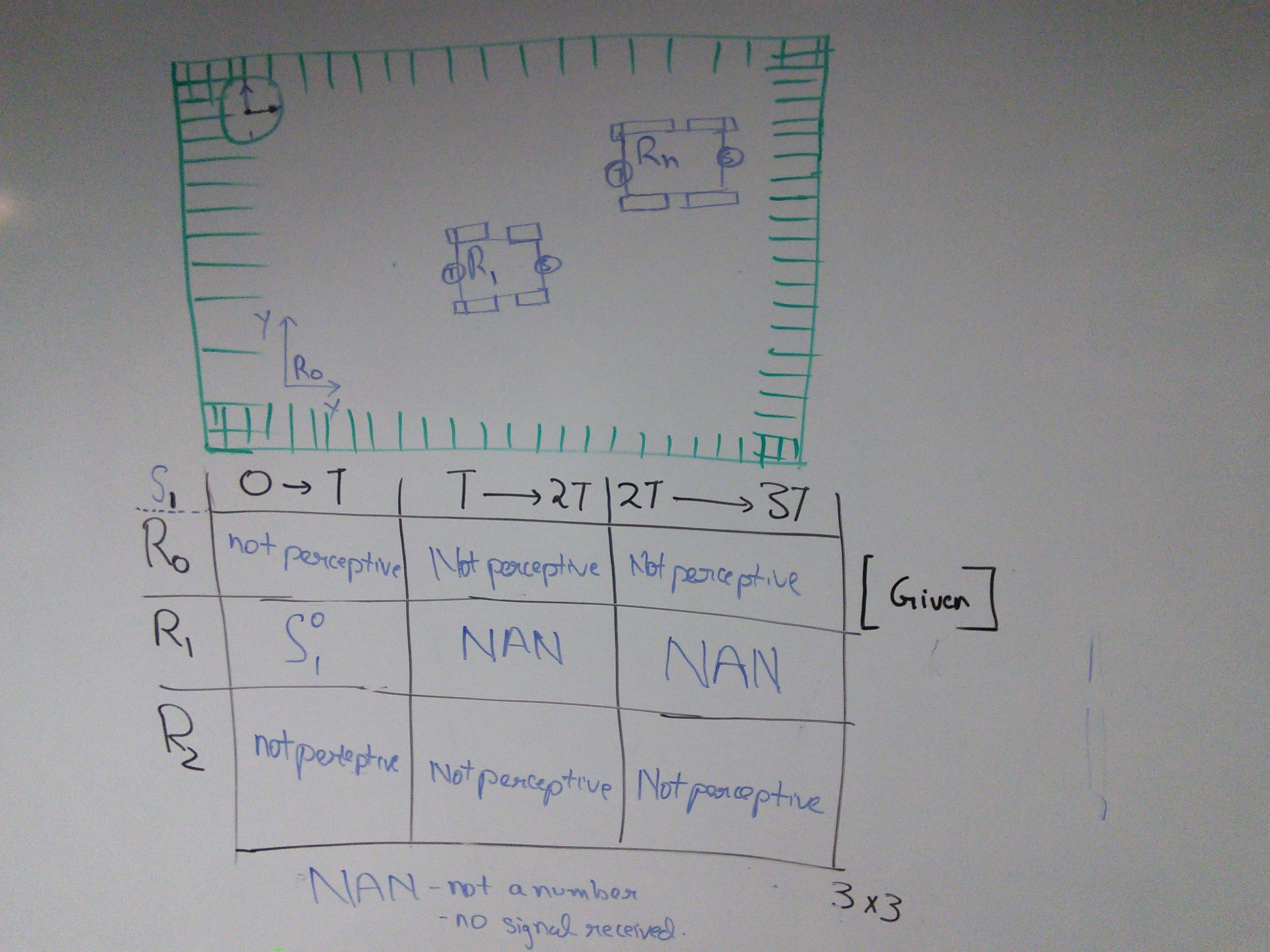
As per our initial design choice to have a rover pose be determinable by at least one another rover operating within the same network, we will need an additional 360 degree rotational degree of freedom to track the rescue rover (leaves its prior neighbor). As it approaches the entrapped rover it can happen that the entrapped rover might loose track of rescuer for extended period of time which is dependent on the “safe rescue and approach plan” determined by the pair. During this process of rescuing if the rescuer has to approach from behind the sweeper’s field of view, we stand a chance of losing track of the rescuer as well (which is no longer able to intercept a sweep signal from any of the entities in the system).