The Chopsticks Surgical System
Augmented Reality for Minimally Invasive Tumor Resection

The Chopsticks Surgical System
Augmented Reality for Minimally Invasive Tumor Resection




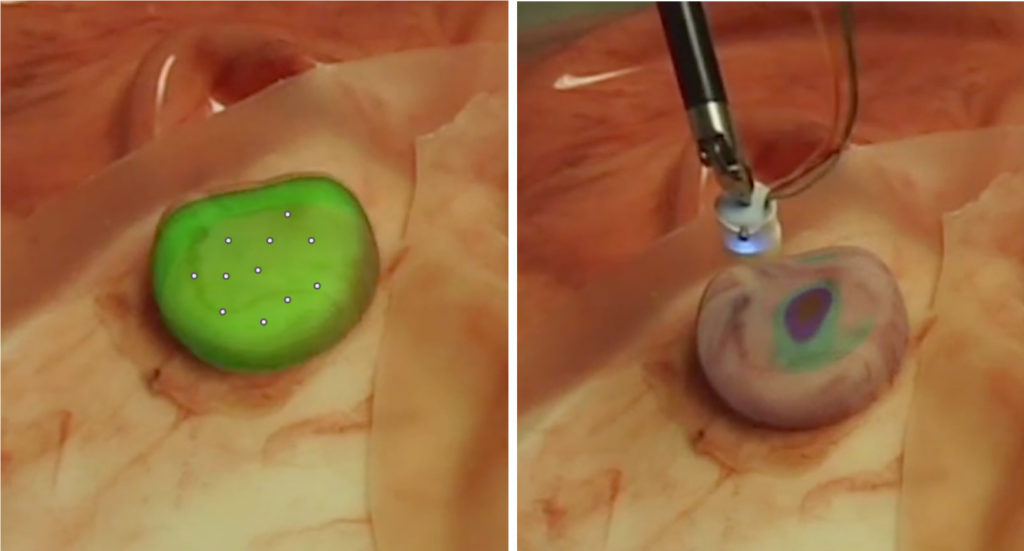
Dr. A is setting up a tumor resection for his patient, Mr. B, who has been diagnosed with liver cancer. In order to remove the cancerous cells, Dr. A needs to reliably localize tumors in the liver. A solution to this problem comes in the form of the Chopsticks Surgical System, depicted below in Figure XXX, which is a robotic system to assist tumor palpation and localization in minimally invasive surgery. Dr. A prepares Mr. B for his surgery with the Chopsticks system. He positions the tooltips of chopsticks close to the organ of interest and positions the stereo camera to look at the entire organ scene by manipulating the Da Vinci Robot Kit (dVRK) arms manually. He then activates Chopsticks, which gets to work immediately. One arm of Chopsticks performs a laser scan of organs in view and generates 2D line scans; this information is augmented with the view of the organ from the stereo camera to segment out the organ of interest. In our case, we assume this organ to be the liver. The combination of these two sensors’ data yields an accurate representation of the intra-operative model of the liver, regardless of organ motion within the body. Dr. A then selects the region of interest
(ROI) within the liver which he wants Chopsticks to palpate by clicking on boundary points in the visual feed. The second arm of Chopsticks, which has a force sensor mounted on its tip, then autonomously palpates the specified portion of the liver to check for the presence of embedded tumors. Higher force readings indicate stiffer tissue and the presence of tumors. The obtained force readings are converted to a heat-map representing relative stiffness in the region specified by Dr. A. This is overlaid onto the live video feed from the left and right cameras. Dr. A, who can see the exact shape and location of tumors in the liver on his camera feed, now has sufficient information to begin the tumor resection procedure.