1. Human Detection and Navigation Subsystem
Based on the questions framed using the requirements of each subsystem in the last section, we prepared a table of criteria which would affect the answers to those questions depending upon the success and failures to meet them.
The table is designed such that if the criteria is met, then we mark it as 1 or we mark it as 0 otherwise. If the criteria is met partially and is within the acceptable value then we mark it as 0.5. The total score of each iteration is taken and divided by the number of criteria. This would give us the success and failure probability. If this probability is more than what we promised in performance requirements then the system is delivered as promised but if not then there is certain improvement that has to be done.
For each of the subsystems we performed 10 iterations with different initial conditions and restarting the system entirely. By different initial conditions, we placed the Turtlebot at random position in the room and human was placed randomly a with the April tag in the room.
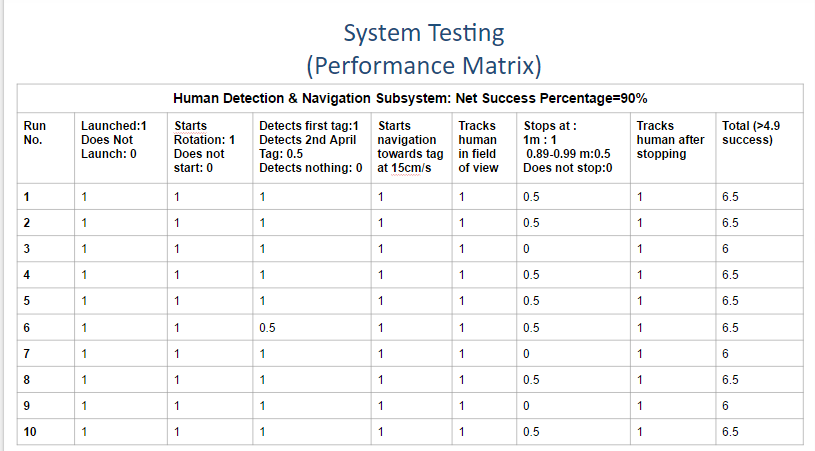 Table1: The performance matrix for the Human Detection and Navigation subsystem.
Table1: The performance matrix for the Human Detection and Navigation subsystem.
If we observe, the success of each of the criteria is important. Failure to meet even one criteria could significantly affect the performance of the system. The last column is the total of each iteration and it is out of 7. In order to meet the 70 percent requirement it has to be greater that 4.9 out of 7. The results were calculated as above and when the numbers in the last columns were divided by the total number of criteria, the net success percentage we got was more than 90 percent which is more than what we promised as 70 percent in the requirements.
The Human detection and Navigation subsystem worked better than what we promised so now there is no more scope of improvement required.
2. Face expression and smile detection subsystem
In this subsystem, as in the Human Detection and Navigation Subsystem we find out the criteria based on the questions we framed in modelling and analysis. Success scenarios of each of these criteria again is important to the fulfilment of the requirement of this subsystem. The scores were allotted in a similar manner as in the Human Detection and Navigation Subsystem.
Here too we performed the entire experiment 10 times with different initial conditions. For this subsystem the different initial conditions were changing the person of interest as well his expressions. The person than moved his face randomly in any direction such that the tracking of head would be tested properly.
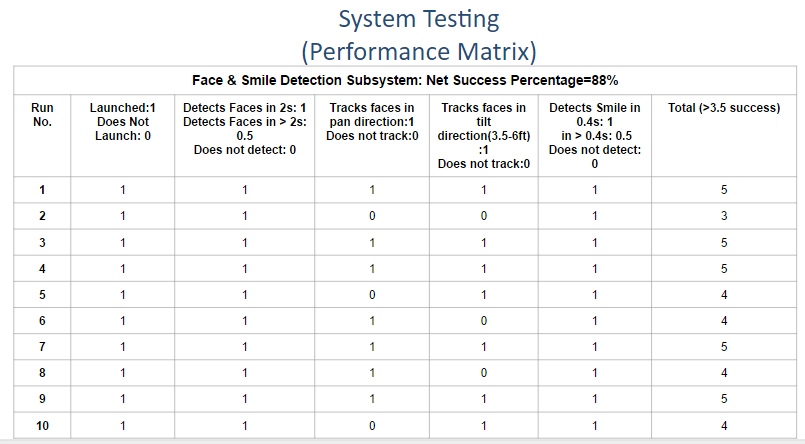
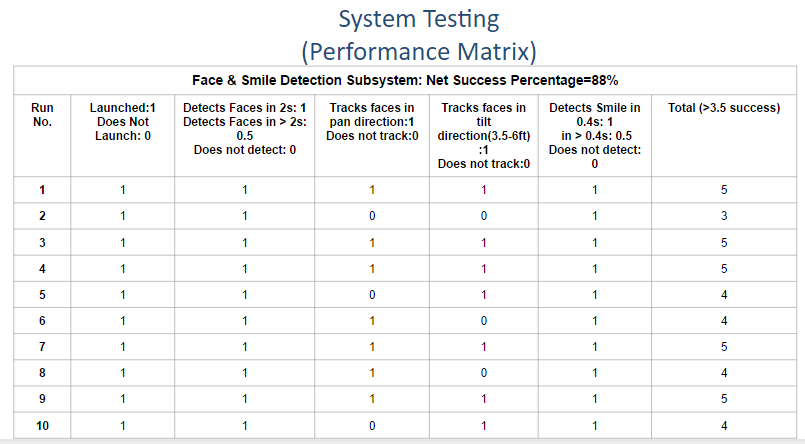 Table 2: Performance Matrix for smile subsystem
Table 2: Performance Matrix for smile subsystem
{kind=link}
On performing the total as in above subsystem, the promised performance requirements was 80 percent success ratio. Based on this the total should be anything more than 3.5. The overall performance came out to be greater than 80 percent and thus we achieved all our performance requirements.
Thus we delivered what was promised by us in Fall Validation Experiments. In fact we got better results than what was promised so we can confidently proceed with our future development of swarm system and try to complete other requirements as soon as possible. The only requirement that we could not deliver was the photo clicking node after smile detection which will be completed first in the spring.